Kompas Elektroniczny
Tomasz Bartuś
Tweet
2017-05-02

Wstęp
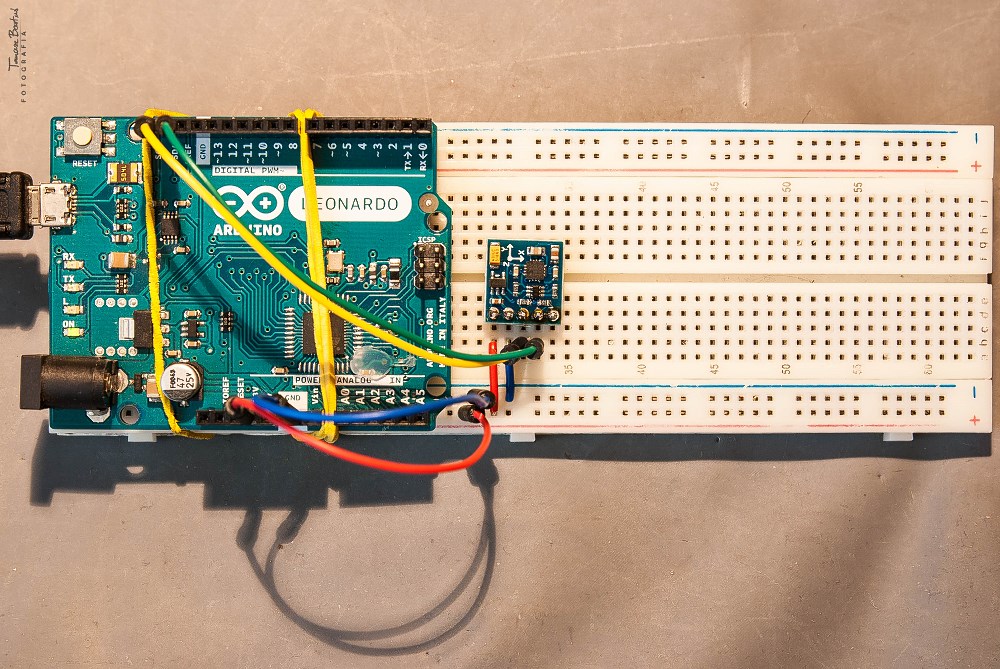
Projekt przedstawia zastosowanie magnetometru elektronicznego GY-271 do wyznaczania kierunków geograficznych (Fig. 1).
Trochę teorii
Ziemia zachowuje sie jakby była olbrzymim magnesem. Każdy pomiar jej pola magnetycznego dostarcza wartości, które stanowią wypadkową skałdowych pól magnetycznych różnorodnego pochodzenia. Składniki te można rozważać oddzielnie:
- pole główne, wytworzone w płynnym jądrze Ziemi za pośrednictwem mechanizmu samowzbudnego dynama (geodynama),
- pole skorupy ziemskiej wytworzone przez oddziaływania minerałów posiadających właściwości ferromagnetyczne (paleomagnetyzm),
- pole zewnętrzne, wyprodukowane przez ładunki prądu elektrycznego przepływającego w jonosferze i w magnetosferze w efekcie oddziaływań pomiędzy wiatrem słonecznym i polem geomagnetycznym
- pole elektromagnetyczne wywoływane przez prądy indukowane w skorupie i płaszczu Ziemi na skutek zmieniającego się w czasie pola zewnętrznego.
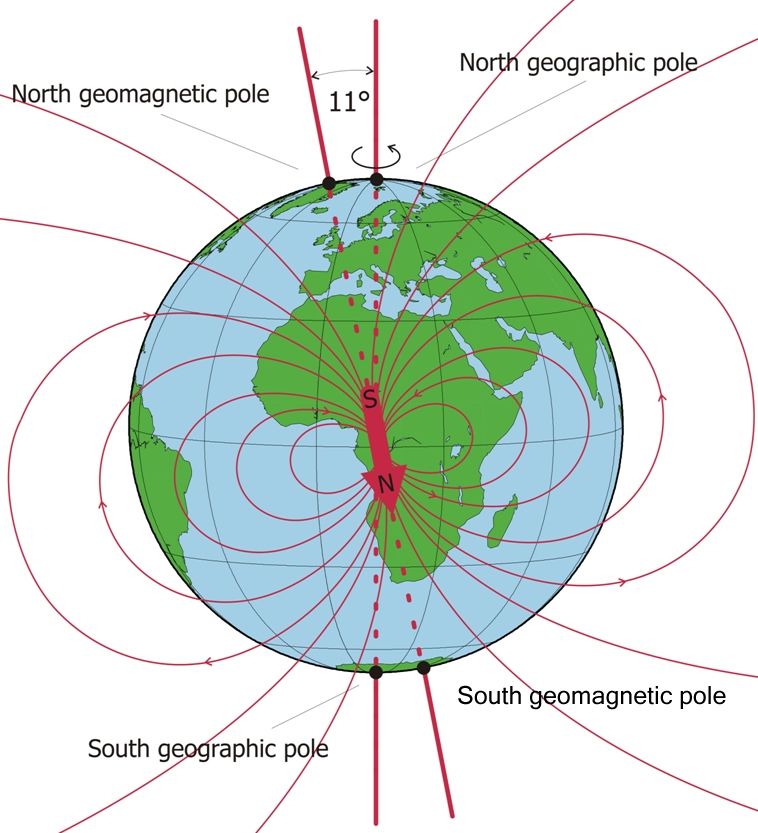
Pole główne reprezentuje około 99% całego pola magnetycznego obserwowanego na powierzchni Ziemi. Proste badanie jego geometrii wskazuje na jego podobieństwo do pola magnetycznego, które mógłby wytwarzyć dipol magnetyczny (magnes) znajdujący się w środku Ziemi (Fig. 2). Położenie jego biegunów oraz natężenie pola zmieniają się w czasie i są przesunięte względem osi obrotu Ziemi, która wyznacza położenie biegunów geograficznych. Kąt pomiędy osią obrotu Ziemi, a osią wyznaczoną położeniem biegunów magnetycznych wynosi około 11°. Igła magnetyczna, która poddawana jest działaniu pola magnetycznego Ziemi ustawia się wzdłuż kierunku sił pola magnetycznego (czyli do bieguna magnetycznego) wyznaczając kierunek magnetyczny.
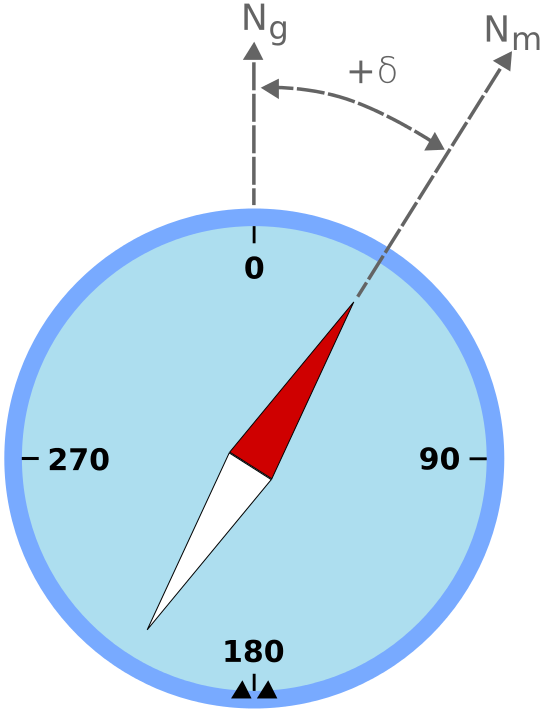
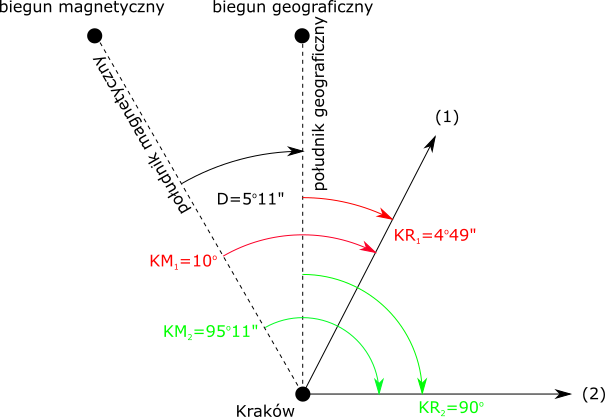
Kierunek południka magnetycznego jest najczęściej odchylony względem południka geograficznego o tzw. kąt deklinacji. Jest to kąt poziomy wyznaczany w danym miejscu na powierzchni Ziemi pomiędzy południkiem magnetycznym i geograficznym. Kąt ten podaje się jako wartość ze znakiem, zgodnie ze sposobem liczenia azymutu: odchylenie kierunku północy magnetycznej od kierunku północy geograficznej ku wschodowi jako kąt dodatni (Fig. 3), odchylenie ku zachodowi jako kąt ujemny. Deklinacja może być w związku z tym zachodnia bądź wschodnia. W Polsce - wschodnia.
Chcąc na podstawie danych wyznaczonych busolą wyznaczyć rzeczywisty kurs (kierunek) geograficzny, należy do azymutu magnetycznego dodać wartość deklinacji (w zależności od położenia, będzie to wartość dodatnia bądź ujemna). Wartość deklinacji, dla danej lokalizacji można odczytać ze specjalnych, na bieżąco aktualizowanych, map magnetycznych np: http://www.magnetic-declination.com/ (Fig. 4). W rzeczywistości wartość deklinacji zawiera także poprawkę wynikającą z obecności w skorupie ziemskiej skał budowanych przez minerały o właściwościach ferromagnetycznych.
Jak wynika z Fig. 4, Kraków posiada deklinację dodatnią (wschodnią). Jej wartość wynosi D=5°11". Oznacza to, że jeżeli będziemy się poruszać wzdłuż azymutu wyznaczonego busolą wynoszącego KM1 = 10° (1), w rzeczywistości będziemy się przemieszczać kursem rzeczywistym, wzdłuż geograficznego azymutu KR1 = 4°49" (Fig. 5). Jeśli natomiast chcemy z Krakowa przemieszczać się kursem rzeczywistym KR2 = 90° (2), wtedy do azymutu 90° musimy dodać wartość deklinacji (KR+D=KM) i poruszać się wzdłuż kursu magnetycznego 95°11".
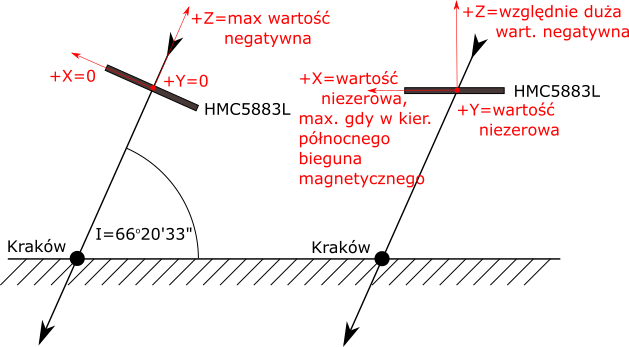
Poza kątem deklinacji mamy jeszcze odchyłkę igły w płaszczyźnie południka magnetycznego od płaszczyzny poziomej. Ten kąt nazywamy kątem inklinacji (Fig. 6). Inklinacja na biegunach wynosi 90°. Na półkuli północnej, inklinacja, w większości przypadków jest dodatnia, tzn., że igła jest pochylna ku dołowi. Wg danych zaczerpniętych ze strony National Centers for Environmental Information (NOAA), w 2017r. inklinacja dla Krakowa wynosiła 66°20'33".
Pole magnetyczne nie jest stałe. Jego składowe t.j. deklinacja, inklinacja i natężenie ulegaja ciągłym zmianom dziennym, rocznym i sekularnym (obejmującym setki, a nawet tysiące lat).
Magnetometr HMC5883L
Moduł GY-271 (Fig. 7) oparty na układzie HMC5883L umożliwia pomiar wektora pola magnetycznego w trzech osiach X, Y i Z. Czujnik mierzy w zakresie maksymalnie ±8Gs (gaussów), z rozdzielczością 5mGs. Zakres pracy czujnika jest konfigurowalny. Moduł może być zasilany napięciem 3,3-5,0V. Dobrze pracuje w logice 3 i 5V. Z mikrokontrolerami komunikuje się za pomocą interfejsu I2C (Tab. 1). Układ posiada wbudowane rezystory podciągające 2,2kΩ podłączone do sygnałów SDA i SCL. Cechuje się niskim poborem prądu (do 1000uA).
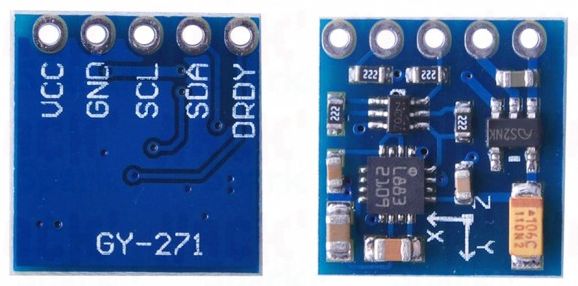
| VCC | Napięcie zasilania 3,3-5,0 V |
|---|---|
| GND | Masa |
| SCL | Linia zegarowa magistrali I2C (TWI), toleruje napięcia 3,3-5,0 V |
| SDA | Linia danych magistrali I2C (TWI), toleruje napięcia 3,3-5,0 V. |
| DRDY | Przerwanie zewnętrzne sygnalizujące stanem niskim gotowość danych. Domyślne podciągnięte do napięcia zasilania |
Zasada działania
W standardowych, analogowych kompasach, swobodnie zawieszona, namagnesowana igła układa się zawsze wzdłuż linii sił ziemskiego pola magnetycznego (wzdłuż kierunków magnetycznych północ-południe). Pomiar kierunków (azymutów) odbywa się poprzez pomiar kąta znajdujacego się pomiędzy kierunkiem północnym, a danym kierunkiem (np. marszu).
Czujniki pola magnetycznego wykorzystywane w kompasach elektronicznych przetwarzają wartości wektora natężenia pola magnetycznego na proporcjonalne do nich sygnały elektryczne (napięcie, zmianę rezystancji lub częstotliwość). W przypadku magnetometru HMC5883L wewnątrz układu scalonego znajdują się trzy czujniki magneto-rezystancyjne (ang. magnetoresistive sensor) wykonujące pomiary wektorów pola magnetycznego wzdłuż trzech osi układu kartezjańskiego: X, Y i Z. Mierzone wartości wpływają na wartości prądu przypływającego przez sensory. Poprzez dostosowanie przyjętej skali pomiarowej do wartości tego prądu, dokonywane są pomiary składowych wektora ziemskiego pola magnetycznego. Pomiary podawane są w jednostce gauss [Gs]. W układzie Si miarami pola magnetycznego są: [A/m] lub tesla (T). Tab. 2. przedstawia współczynniki przeliczeniowe najważniejszych jednostek.
| [T] (tesla) | [A/m] (amper na metr ) | [Gs] (gauss) | [Oe] (oersted) | |
|---|---|---|---|---|
| [A/m] | 1,256*10-6 | 1 | 12,56 × 10-3 | 12,56*10-3 |
| [Oe] | 10-4 | 79,6 | 1 | 1 |
| [T] | 1 | 7,96 × 105 | 104 | 104 |
| [Gs] | 10-4 | 79,6 | 1 | 1 |
USTAWIENIA
Przed rozpoczęciem pracy, magnetometr należy skonfigurować. Możemy ustawić następujące parametry: tryb pracy, skalę pomiarową i częstotliwość pomiaru.
Tryby pracy
Układ może pracować w jednym z trzech trybów: pomiaru ciągłego, pojedynczego i w trybie uśpienia.
- W trybie ciągłym urządzenie stale dokonuje pomiarów, z zadanymi przez użytkownika parametrami i wyniki umieszcza w rejestrach danych wyjściowych.
- W trybie pojedynczego pomiaru urządzenie wykonuje pojedynczy pomiar i umieszcza zmierzone dane w rejestrach danych wyjściowych. Po zakończeniu pomiaru i uaktualnieniu rejestrów, urządzenie jest wprowadzane w trybie oczekiwania, a rejestr trybu zostaje zmieniony na tryb bezczynności, ustawiając bity MD [n]. Ustawienia w rejestrze konfiguracji wpływają na konfigurację pomiaru (bitów MS [n]) w trybie pojedynczego pomiaru. Wszystkie rejestry utrzymują wartości w trybie pojedynczego pomiaru. W trybie pojedynczego pomiaru magistrala I2C jest włączona dla innych urządzeń pracujących w sieci. Jest to tryb domyślny.
Wzmocnienie (skala)
W zależności od występującego natężenia pola magnetycznego, należy dobrać odpowiedni zakres pomiarowy (skalę, Tab. 3). Jego wybór pozwala na pomiar z odpowiednią rozdzielczością. Podając za Wikipedią, indukcja ziemskiego pola magnetycznego przy powierzchni Ziemi zawiera się obecnie w granicach od 30uT (odpowiada to natężeniu pola magnetycznego 0,3Gs lub 24A/m) dla większości obszarów położonych na małych i średnich szerokościach geograficznych, do 60uT (0,6Gs, 48A/m) dla obszarów położonych w okolicach biegunów magnetycznych w północnej Kanadzie, w południowej Australii oraz w części Syberii. Domyślne ustawienie pozwala na pomiar pola magnetycznego w zakresie ±1.3Gs z rozdzielczością 0.92uGs. Przedział ten w całości pokrywa pełen zakres zmienności ziemskiego pola magnetycznego. W przypadkach szczególnych (np. sztucznych pól magnetycznych) możemy mieć do czynienia z silniejszymi natężeniami. Ich pomiar za pomocą zbyt małego zakresu nie będzie możliwy i będzie powodował raportowanie błędów. W takich przypadkach należy zmienić zakres na większy. Każdorazowa zmiana zakresu pomiarowego na większy skutkuje spadkiem rozdzielczości przyrządu. Zmiana zakresu pomiarowego odbywa się poprzez określenie parametru wzmocnienia .
| Zakres pomiarowy [Gs] | Wzmocnienie [LSb/Gs] | Rozdzielczość [mGs/LSb] |
|---|---|---|
| ±0.88 | 1370 | 0.73 |
| ±1.3 | 1090 (domyślny) | 0.92 |
| ±1.9 | 820 | 1.22 |
| ±2.5 | 660 | 1.52 |
| ±4.0 | 440 | 2.27 |
| ±4.7 | 390 | 2.56 |
| ±5.6 | 330 | 3.03 |
| ±8.1 | 230 | 4.35 |
Wzmocnienie nazywane także współczynnikem skali lub krócej skalą, jest w rzeczywistości prostym mnożnikiem (lub dzielnikiem), ale z powodu nieintuicyjnych wartości oraz jednostek wymaga krótkiego komentarza. Zasada jest taka sama jak w przypadku jednostek odległości. 100cm = 1m, a 1cm = 0,01m. W przypadku wzmocnienia inne są tylko jednostki i mnożniki. W Tab. 3, która została zaczerpnięta z dokumentacji technicznej, znajdziemy informację: "dla domyślnego wzmocnienia, 1090 LSb przypada na Gaussa". LSb to tzw. najmniej znaczący bit (ang. least significant bit). Jego sens jest taki jak powyzej cm. Gauss jest oczywiście jednostką pola magnetycznego, który wykonuje to samo zadanie co powyżej metry. Określenie "najmniej znaczący bit" to sposób nazwania jednostki, a dokładniej najmniejszej różnicy pomiędzy dwoma odczytami, które nie są równe. Informacje z Tab. 3 można rozumieć jako odległość pomiędzy działkami na linijce. Domyślne wzmocnienie magnetometru HMC5883L wynosi 1090 LSb/Gs. Można to porównać do linijki, na której jest 1090 jednostek/metr. Odległość pomiędzy dwoma jednostkami (rozdzielczość) wynosi 1/1090, czyli 0,000917m. Jeśli użyjemy linijki do jakiegoś pomiaru i uzyskamy odczyt 2718 jednostek, to znaczy 2718/1090 = 2718 * 0,000917 = 2,493m. Zmiana wzmocnienia zmienia odległość pomiędzy kolejnymi działkami. Na najwyższym możliwym wzmocnieniu dysponujemy linijką z 230 jednostkami/metr lub odległością 0,00435m pomiędzy jednostkami. Pomiar 314 znaczników przełożyłby się na 314/230 = 314*0,00435 = 1,37m. Obliczenia dla magnetometru HMC5883L niczym nie różnią się od powyższych przykladów, zamiast metrów należy tylko użyć "Gauss".
Częstotliwość
W trybie ciągłym, komunikacja pomiędzy magnetometrem i mikrokontrolerem za pomocą magistrali I2C odbywa się z częstotliwością 0,75-75Hz. W trybie pomiarów pojedynczych, pomiary mogą być wykonywane z częstotliwością do 160Hz.
Pomiaru azymutu wyznacza się za pośrednictwem pomiarów składowych wektora pola magnetycznego wzdłuż osi 0X i 0Y. Jeżeli znamy orientację sensora (pochylenie) możemy dokonać kompansacji
Lista części
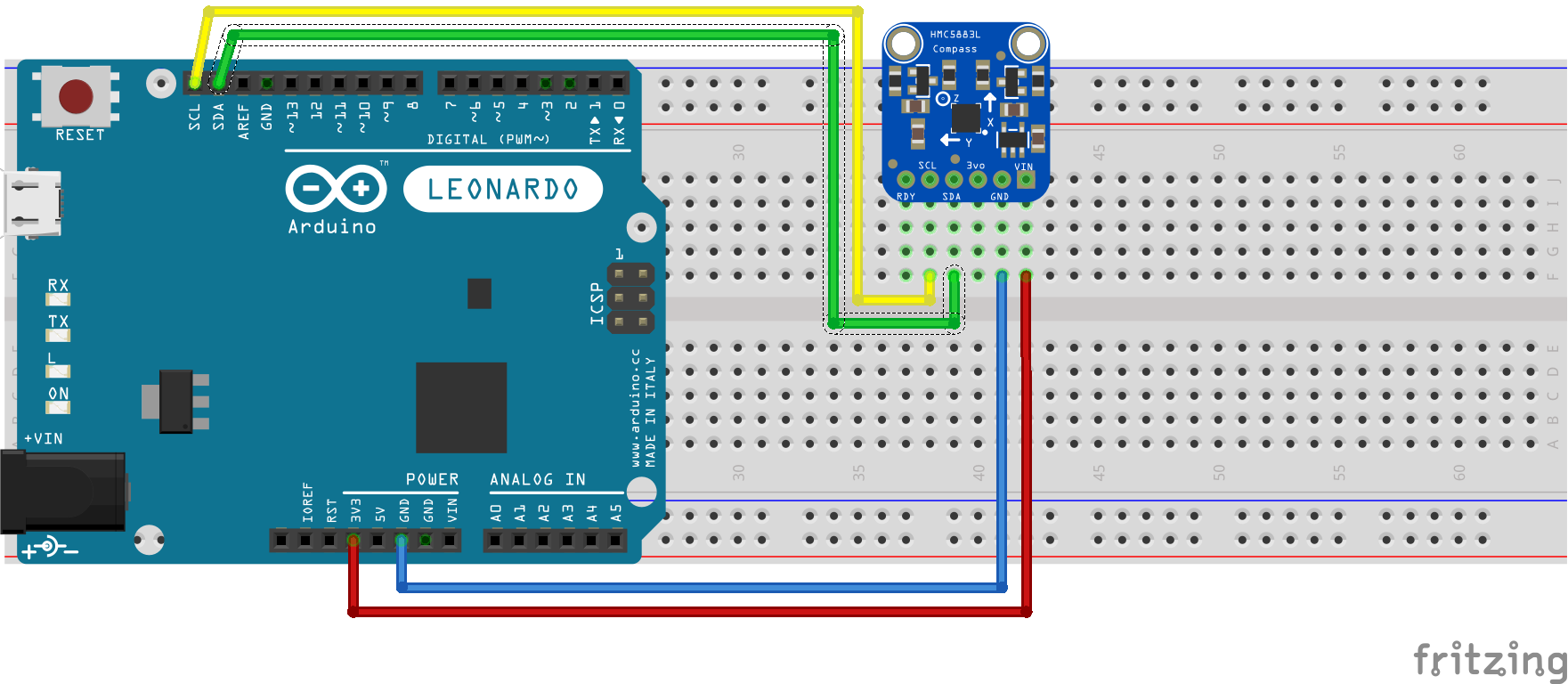
- platforma Arduino (tu Leonardo),
- płytka prototypowa,
- moduł GY-271 (magnetometr cyfrowy HMC5883L),
- przewody/mostki,
Schemat ideowy
Kod
Wykorzystane materiały
Jastrzębski K., 3-osiowy magnetometr HMC5883LNOAA, Magnetic Declination
Przybylski W., Deklinacja magnetyczna
Tumański S., Czujniki pola magnetycznego
3-axis Digital Compass Module
https://www.youtube.com/watch?v=3WkJ7ssZmEc&feature=youtu.be
https://forums.adafruit.com/viewtopic.php?f=8&t=70521