Ruchomy panel fotowoltaiczny - mechanika i sterowanie (cz. 2/4)
Tomasz Bartuś
Tweet
2016-10-01

Wstęp
Projekt ma na celu zbudowanie interaktywnego panel fotowoltaicznego, który w trakcie dnia będzie automatycznie śledził Słońce poruszające się po nieboskłonie. W części 1-szej projektu (Tracking panelu solarnego cz. 1/4) zbudowaliśmy moduł czujników światła i pomierzyliśmy wartości analogowych sygnałów dostarczanych z dzielników napięcia fotorezystorów. W tej części projektu utworzymy część mechaniczą i będziemy nią sterować za pomocą Arduino. W 3-ciej i 4-tej części projektu (Ładowarka słoneczna, Ładowarka słoneczna (modyfikacja)) utworzony zostanie panel fotowoltaiczny oraz zostanie zbudowany układ ładowania akumulatorów oraz układ umożliwiający podłączenie do niego urządzeń elektrycznych
Założenia:
- panel słoneczny powinien wychylać się w dwóch płaszczyznach XOY oraz YOZ,
- wieczorem, w momencie zaniku oświetlenia słonecznego, panel powinien zmieniać swe nachylenie na poziome, rano powinien zacząć działać normalnie od właściwych ustawień dla azymutu wschodniego,
- panel zmienia swe nachylenie na poziome w momencie rejestracji silnych podmuchów wiatru,
- za pomoca wyświetlacza informuje o parametrach wychylenia, siły i kierunku wiatru,
Układ
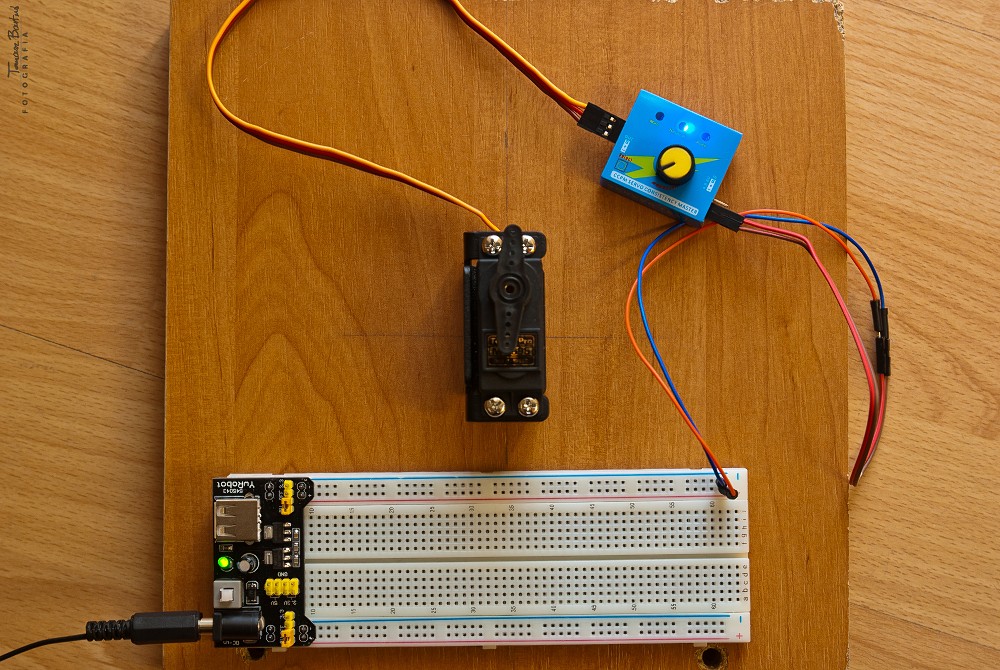
Najważniejszą częścią mechaniki układu będzie urządzenie złożone z dwóch serwomechanizmów, które dzięki aluminiowemu uchwytowi umożliwi ruch panelu fotowoltaicznego w dwóch płaszczyznach XOY oraz YOZ. Do wykonania układu użyto dwóch serwomechanizmów wielkości standard (typ: MG995) umożliwiających obrót orczyka o 60° w każdą stronę (łącznie 120°). Razem z nimi zakupiony został odpowiedni uchwyt umożliwiający zmontowanie obu serw i przykręcenie do niego płaszczyzny panelu fotowoltaicznego oraz układ testujący serwa (Fig. 2).

Lista części
- platforma prototypowa Arduino (Leonardo),
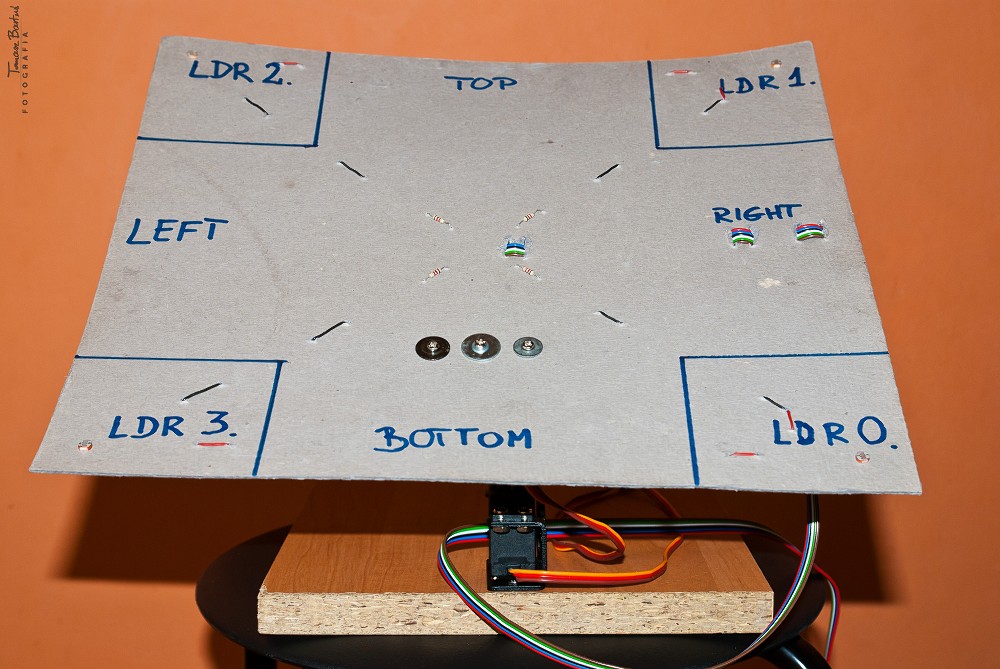
- fotorezystory 5-10KΩ (4 szt.: LDR0, LDR1, LDR2, LDR3),
- rezystory 100Ω (4 szt.: R0, R1, R2, R3),
- serwomechanizmy MG995 (2 szt.) [Nota katalogowa],
- zestaw uchwytów serw umożliwiający ich przechył w dwóch płaszczyznach i osadzenie mechanizmu na podstawie,
- tester serw np.: 3CH ECS,
- zasilacz serwomechanizmów,
- płytka prototypowa,
- przewody,
- płyta wiórowa podstawy,
Montaż
Montaż rozpoczęto od przycięcia z płyty wiórowej odpowiedniej podstawy (w przypadku projektu: 220 × 220 mm) (Fig. 3).

Po zamontowaniu na podstawę serwomechanizmu obrotu horyzontalnego (azymutalnego), przystąpiono do jego kalibracji. Polegała ona na ustawieniu wrzeciona w pozycji neutralnej (tzn. w pozycji środkowej odpowiadającej położeniu 60° w kierunku maksymalnego lewego i prawego położenia orczyka) (Fig. 4).
Po zamontowaniu serwa obrotu poziomego, przystąpiono do montażu zakupionego zestawu (serwa + uchwyt). Wykorzystywano instrukcję montażową (Fig. 5).
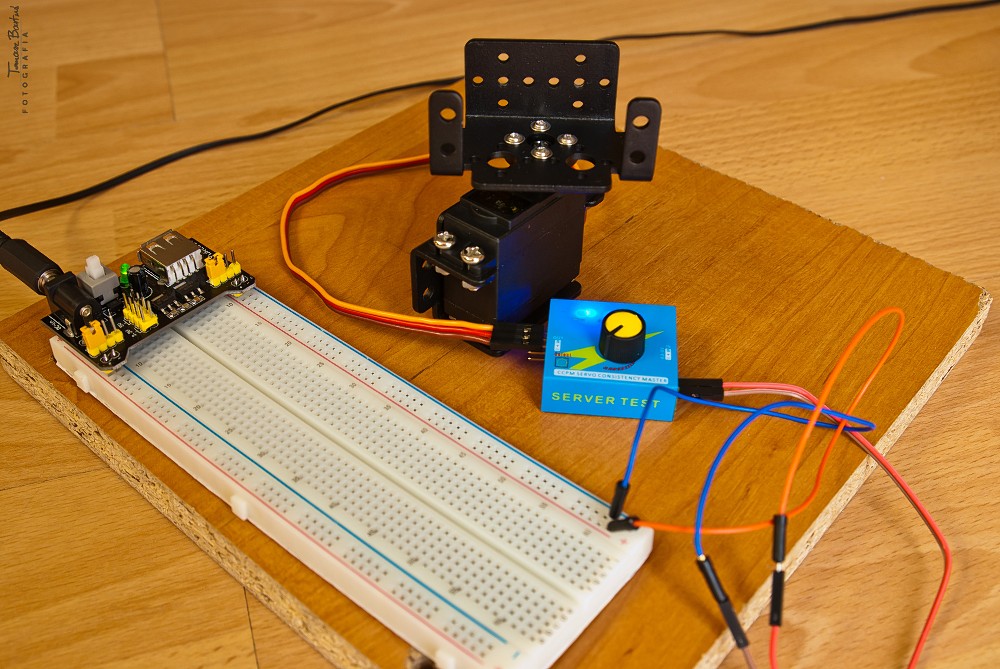
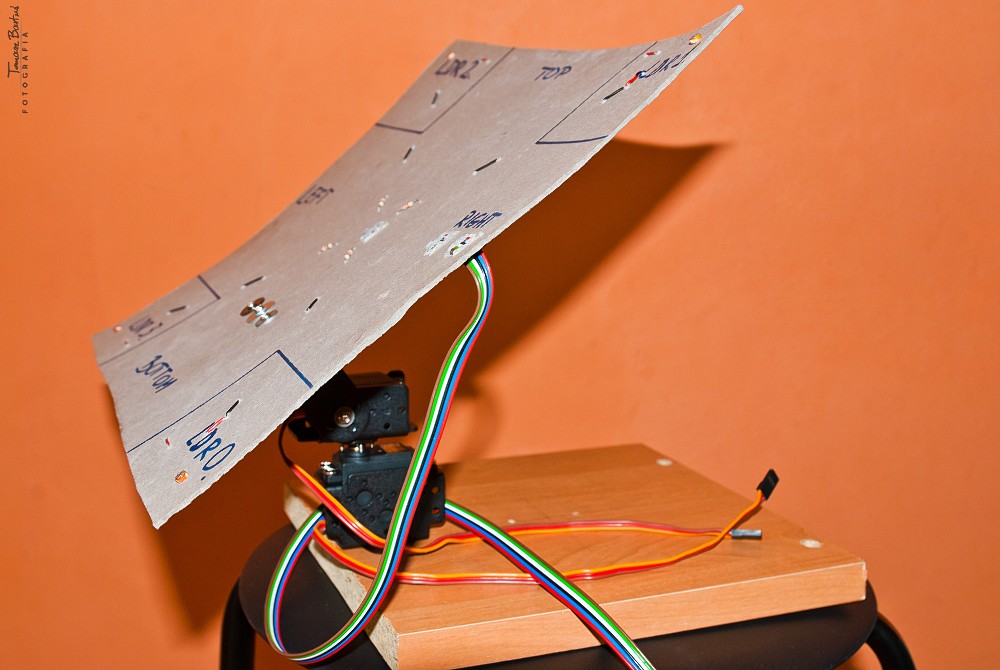
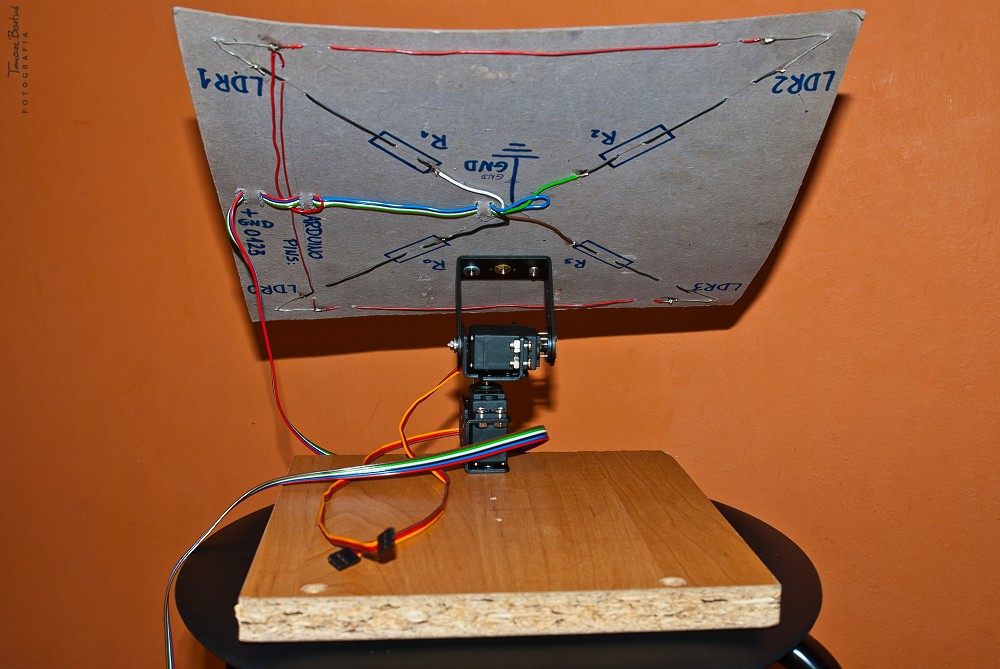
W trakcie montażu warto zwrócić uwagę na odpowiednie skalibrowanie serwomechanizmu rotacji pionowej. W moim przypadku, pozycja neutralna została ustawiona pod kątem 45° pomiędzy zenitem, a płaszczyzną poziomą. Zmontowany mechanizm przedstawia Fig. 6. Jak widać przesunięto także cały mechanizm do jednej z krawędzi podstawy. Po przykręceniu panelu czujników światła, umożliwi to ich nieskrępowany ruch w obu płaszczyznach.
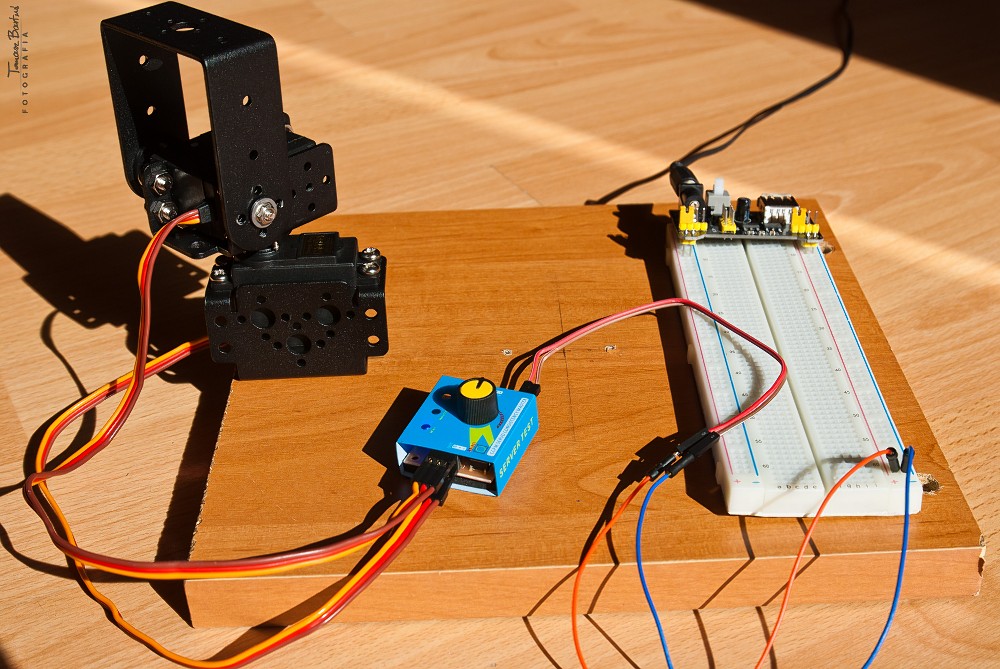
Efekt końcowy przedstawiają Fig. 1, 7-9.
Film:
Kod:
/////////////////////////////////////////////////////////////////// // Obsługa panelu śledzącego padające oświetlenie. Do wykorzy- // // stania w projekcie samonastawnego panelu fotowoltaicznego. // // // // pomysł: http://www.electronicshub.org/arduino-solar-tracker/ // // projekt: bartus[malpa]agh.edu.pl // /////////////////////////////////////////////////////////////////// #include <Servo.h> int czulosc = 30; // Czułość oznacza różnicę pomiarów górnych/donych ew. prawych/lewych fotorezystorów //Definiowanie serwomechanizmów Servo servohori; int servoh = 0; int servohLimitHigh = 160; // płaszczyzna panelu ustawiona w kier. wschodnim int servohLimitLow = 20; // płaszczyzna panelu ustawiona w kier. zachodnim Servo servoverti; int servov = 0; int servovLimitHigh = 120; // płaszczyzna panelu ustawiona poziomo int servovLimitLow = 50; // płaszczyzna panelu ustawiona pionowo //Przypisanie pinów fotorezystorom (LDR) int ldrtopl = 2; //górny lewy (zielony) int ldrtopr = 1; //górny prawy (biały) int ldrbotl = 3; //dolny lewy (brązowy) int ldrbotr = 0; //dolny prawy (czarny) void setup () { Serial.begin(9600); //Przypisanie pinów serwomechanizmom servohori.attach(10); servohori.write(90); servoverti.attach(9); servoverti.write(90); delay(500); } void loop() { servoh = servohori.read(); // aktualny kąt poziomy servov = servoverti.read(); // aktualny kąt pionowy //Pobranie wartości spadków napięć na fotorezystorach int topl = analogRead(ldrtopl); int topr = analogRead(ldrtopr); int botl = analogRead(ldrbotl); int botr = analogRead(ldrbotr); //Obliczenie średnich int avgtop = (topl + topr) / 2; // średnia arytm. z pomiarów górnych fotorezystorów int avgbot = (botl + botr) / 2; // średnia arytm. z pomiarów dolnych fotorezystorów int avgleft = (topl + botl) / 2; // średnia arytm. z pomiarów lewych fotorezystorów int avgright = (topr + botr) / 2; // średnia arytm. z pomiarów prawych fotorezystorów if(abs(avgtop - avgbot) > czulosc) { // warunek sprawdzający czy różnica pomiarów jest na tyle znacząca, że warto dokonać zmiany if (avgtop > avgbot) { servoverti.write(servov +1); if (servov > servovLimitHigh) { servov = servovLimitHigh; servoverti.write(servov); } delay(10); } else if (avgbot > avgtop) { servoverti.write(servov -1); if (servov < servovLimitLow) { servov = servovLimitLow; servoverti.write(servov); } delay(10); } else { servoverti.write(servov); } } // zamknięcie war. spr. czy różnica pomiarów jest na tyle znacząca, że warto dokonać zmian if(abs(avgleft - avgright) > czulosc) { // warunek sprawdzający czy różnica pomiarów jest na tyle znacząca, że warto dokonać zmiany if (avgleft < avgright) { servohori.write(servoh +1); if (servoh > servohLimitHigh) { servoh = servohLimitHigh; servohori.write(servoh); } delay(10); } else if (avgright < avgleft) { servohori.write(servoh -1); if (servoh < servohLimitLow) { servoh = servohLimitLow; servohori.write(servoh); } delay(10); } else { servohori.write(servoh); } } // zamknięcie war. spr. czy różnica pomiarów jest na tyle znacząca, że warto dokonać zmiany delay(50); Serial.print("Kąt poziomy: "); Serial.println(servoh); Serial.print("Kąt pionowy: "); Serial.println(servov); //delay(1000); }