1. PRZYKŁAD oprogramowania MES
1.1. Sformułowanie problemu
W ostatnim rozdziale niniejszego opracowania przedstawiono przykład oprogramowania, które stanowi rozwiązanie zagadnienia nieustalonej wymiany ciepła w układzie dwuwymiarowym. Podstawy teoretyczne tego rozwiązania są podane w rozdziałach 5 i 6. Układ równań MES uzyskano za pomocą wzoru (6.8):
![]() , (6.8)
, (6.8)
gdzie poszczególne wyrażenia obliczono za pomocą równań (5.14), (5.15) i (6.3):
 (5.14)
(5.14)
![]() , (5.15)
, (5.15)
![]() . (6.3)
. (6.3)
We wzorze (6.8) {t1} oznacza wartości temperatur węzłowych po
czasie ![]() , natomiast wektor {t0} reprezentuje temperatury węzłowe w chwili
, natomiast wektor {t0} reprezentuje temperatury węzłowe w chwili ![]() .
.
Ponieważ analogiczną postać mają równania dla zadań dyfuzji, dlatego opracowany program po zmianie współczynników można wykorzystać do modelowaniu procesów dyfuzji. Wyzerowanie macierzy [C] spowoduje rozwiązanie ustalonego zadania cieplnego albo innego zadania opartego na równaniu Poissona (3.65).
1.2. Dane wejściowe
Dane wejściowe do opracowanego programu są zadawane w postaci pliku tekstowego. Przykładową zawartość takiego pliku wraz z opisem wczytywanych zmiennych pokazano na rys. 9.1.
100 mTbegin Temperatura
początkowa, C
1000 mTime Czas
procesu, s
1 mdTime Krok
czasowy, s
1200 mT_otoczenia Temperatura
otoczenia C
300 mAlfa Współczynnik
wymiany ciepła W/Cm2
100 mH0 Wysokość
przekroju, mm
100 mB0 Szerokość
przekroju, mm
25 mNhH Liczba
węzłów po wysokości
25 mNhH Liczba
węzłów po szerokości
700 mC Ciepło
właściwe, J/Ckg
25 mK Współczynnik
przewodzenia ciepła
7800 mR Gęstość
kg/m3
Rys. 9.1. Przykład zawartości pliku z danymi do obliczeń
1.3. Kod źródłowy programu
Program zawiera kilku modułów, a zawartość najważniejszych z nich jest opisana poniżej. Pełny tekst programu napisanego w języku FORTRAN90 można znaleźć na stronie internetowej http://home.agh.edu.pl/~milenin/programs/.
1.3.1. Program główny TEMP2D
Kod źródłowy programu głównego TEMP2D jest podany na rys. 9.2. Oznaczenia głównych zmiennych są następujące:
GlobData – nazwa modułu z opisem globalnych zmiennych;
dTauMax – maksymalnie dopuszczalny krok czasowy, który obliczono z warunku numerycznej stabilności rozwiązania;
n, Ntau – odpowiednio numer bieżącego kroku czasowego i ilość kroków czasowych;
Oznaczenia głównych procedur, które są wywoływane w programie głównym to:
IniEL4 – procedura inicjalizacji danych dla wybranego typu elementu skończonego (wybrany typ: 4-węzłowy element, opisany w rozdziale (4.9));
InpData – wczytywanie danych wejściowych;
GenGrid2d – rozbudowa siatki MES dla obszaru o przekroju prostokątnym;
SetControlPoints – definicja punktów, z jakich będą wyprowadzane wyniki rozwiązania do pliku tekstowego;
ALLOCATE_Matrix – przydzielenie pamięci dla macierzy;
WriteControlPointsBegin – zapis do pliku wyników obliczeń, które wykonano na podstawie danych wstępnych;
WriteControlPoints – zapis wyników obliczeń do pliku;
SOLVER – procedura rozwiązywania zadania dla bieżącego kroku czasowego.
program TEMP2D
!*************************************************************************
! PROGRAM:
TEMP2D
! Milenin
Andre, AGH, 2008, milenin@agh.edu.pl
!************************************************************************
use GlobData;
implicit none
real*8 :: Asr,dTauMax,TauP;
integer*4 :: n, Ntau, i, iErr;
call IniEL4();
call InpData();
call
GenGrid2d(mH0,mB0,mNhH,mNhB, mGr);
call SetControlPoints();
CALL ALLOCATE_Matrix();
CALL WriteControlPointsBegin();
Asr = mK / (mC * mR);
mdTime
= DBLE(mB0/(1e3*mNhB))**2/(0.5*Asr);
CALL WriteControlPoints();
Ntau = int(mTime/mdTime)+1;
mdTime =
mTime/DBLE(Ntau);
mTau = 0;
do
n=1, Ntau
mTau
= mTau + mdTime;
CALL
SOLVER( );
CALL
WriteControlPoints();
end do;
CLOSE(88); CLOSE(89);
DEALLOCATE ( mA,
STAT=iErr );
DEALLOCATE ( mB,
STAT=iErr );
DEALLOCATE ( mX,
STAT=iErr );
end program TEMP2D
Rys. 9.2. Program główny TEMP2D
1.3.2. Modułi z definicją struktur danych i zmiennych globalnych
Wykorzystanie struktur danych ułatwia proces programowania i analizy kodu. Na rys. 9.3 pokazano kod źródłowy modułu My_typ z definicją struktur danych. Wykorzystano w nim następujące struktury:
Node – struktura danych, zawierająca informacje o węźle siatki: x, y – współrzędne węzła, t – temperatura w węźle, CR – prędkość zmiany temperatury;
Element – struktura danych, zawierająca informacje o elemencie siatki MES: nop – mapa elementu (rozdział 7.2.1), Npov – liczba powierzchni elementu, które kontaktują się z otoczeniem; aPov – lokalne numery powierzchni stykowych elementu.
gr2d – struktura danych, zawierająca siatkę MES: nh – liczba węzłów; ne – liczba elementów; nbn – liczba węzłów w wykorzystywanym elemencie skończonym; ncn – liczba zmiennych w elemencie skończonym, która dla zadań cieplnych odpowiada nbn; nhPov – liczba węzłów siatki znajdujących się na powierzchni rozpatrywanego obszaru; EL –macierz o długości ne zawierająca dane typu Element dla każdego elementu siatki; ND –macierz o długości nh zawierająca dane typu Node dla każdego węzła siatki.
cor_L – struktura danych, która zawiera współrzędne N, E punktu w układzie lokalnym dla elementu.
Gran – struktura danych, zawierająca dane o krawędziach powierzchniowych wykorzystywanego elementu skończonego: N_p – liczba punktów całkowania po powierzchni krawędzi; P – macierz elementów typu cor_L o długości N_p zawierająca współrzędne lokalne punktów całkowania Gaussa; W – macierz o długości N_p zawierająca wagi punktów całkowania odpowiednio uwzględnione we wzorze (4.31); Nf – macierz o wymiarach nbn zawierająca wartości funkcji kształtu elementu, które są obliczone w punktach całkowania na powierzchni krawędzi; N1,N2 – macierze o wymiarach nbn zawierające wartości pochodnych funkcji kształtu względem współrzędnych lokalnych, które są obliczone w punktach całkowania na powierzchni krawędzi; UZEL – macierz zawierająca lokalne numery węzłów krawędzi.
ELEM – struktura danych, zawierająca dane o wykorzystywanym elemencie skończonym: nbn – liczba węzłów w analizowanym elemencie skończonym, nbnp – liczba węzłów w analizowanym elemencie skończonym do interpolacji średniego naprężenia (wykorzystywana w zadaniach teorii plastyczności), N_p – liczba punktów całkowania w objętości elementu; Nf – macierz o wymiarach nbn zawierająca wartości funkcji kształtu elementu, które są obliczane w punktach całkowania w objętości elementu; N1, N2 – macierze o wymiarach nbn zawierające wartości pochodnych funkcji kształtu względem współrzędnych lokalnych, które są obliczane w punktach całkowania w objętości wykorzystywanego elementu skończonego; P – macierz elementów typu cor_L o długości N_p zawierająca współrzędne lokalne punktów całkowania Gaussa w objętości elementu; L –macierz elementów typu cor_L o długości N_p zawierająca współrzędne lokalne węzłów elementu; W – macierz o długości N_p zawierająca wagi punktów całkowania w objętości elementu odpowiednio we wzorze (4.31); Sf – macierz o długości równej maksymalnej liczbie powierzchni wykorzystanego elementu skończonego (tutaj równa 4), która zawiera elementy typu Gran.
module My_typ;
!
******************************************************************
! Typy danych
! Milenin Andre, AGH, 2008, milenin@agh.edu.pl
! ******************************************************************
implicit
none;
type
node
real*8
:: x,y,t,CR;
integer*4
:: status;
end
type
type
element
integer*4 :: nop(4);
integer*4 :: Npov; !
Liczba kontaktowych powierzchni elementu 0-1-2
integer*4
:: aPov(2); ! Lokalne numery kontaktowych powierzchni
elementu
end type
type
gr2d
integer*4
:: nh, ne, nbn, ncn, nhPov;
type(element)
, dimension(:), pointer :: EL;
type(node)
, dimension(:), pointer :: ND;
end type
type cor_L;
real*8 N, E;
end type cor_L;
type
Gran
integer*4 :: N_p; ! Liczba
punktów całkowania po powierzchni grani
type(cor_L), dimension(:), pointer ::
P;
real*8, dimension(:),
pointer :: W;
real*8, dimension(:,:), pointer :: N1,N2,Nf; ! N1(nbn,N_p)
integer*1, dimension(:),pointer :: UZEL;
!
Lokalne numery węzłów grani
end
type Gran;
type ELEM;
integer*4
:: nbn, nbnp, N_p;
real*8,
dimension(:,:), pointer :: N1,N2,Nf; !
N1(nbn,N_p)
type(cor_L),
dimension(:), pointer :: P; ! P(N_p)
type(cor_L),
dimension(:), pointer :: L; ! Współrzędne węzłów elementu
real*8, dimension(:), pointer ::
W; ! Waga punktów całkowania W(N_p)
type(Gran)
:: Sf(4);
end
type ELEM;
end module My_typ;
Rys. 9.3. Typy (struktury)
danych potrzebne do otrzymania rozwiązania
Moduł GlobData zawiera definicje zmiennych, które są używane we wszystkich procedurach, gdzie zadeklarowano wykorzystanie tego modułu: use GlobData. Dokładny opis zmiennych podano na rys. 9.4.
module GlobData;
! ******************************************************************
! Globalne zmianne
! Milenin
Andre, AGH, 2008, milenin@agh.edu.pl
!
******************************************************************
use My_typ;
implicit
none;
real*8 ::
mTbegin; ! Początkowa temperatura
real*8 ::
mTime; !
Czas procesu
real*8 ::
mdTime; !
Początkowa wartość przyrostu czasu
real*8 ::
mTau; !
Bieżący czas
real*8 ::
mT_otoczenia; !
Temperatura otoczenia
real*8 ::
mAlfa; !
Współczynnik wymiany ciepła
real*8 ::
mH0; !
Wysokość przekroju
real*8 ::
mB0; !
Szerokość przekroju
integer*4 :: mNhH; !
Liczba węzłów na wysokości przekroju
integer*4 :: mNhB; !
Liczba węzłów na szerokości przekroju
integer*4 :: mLDA; !
Szerokość pasma matrycy MES
real*8 ::
mC; !
Pojemność cieplna
real*8 ::
mK; !
Współczynnik przewodzenia ciepła
real*8 ::
mR; !
Gęstość
type(gr2d) ::
mGr; !
Siatka MES
type(ELEM) :: mEL4; !
Dane uszytego elementu skończonego
integer*4
:: mContrPoints(9); !
Kontrolne punkty
REAL*8 :: mcpX(9),mcpY(9);
real*8,
dimension(4,4) :: est; ! Matryca bieżącego elementu
real*8,
dimension(4) :: r; !
Wektor obciążeń bieżącego elementu
real*8,
dimension(:), allocatable :: mB; !
Globalny wektor obciążeń
real*8,
dimension(:,:), allocatable :: mA; ! Globalna matryca
real*8, dimension(:), allocatable :: mX; ! Globalny wektor niewiadomych
end module GlobData;
Rys. 9.4. Zmienne globalne wykorzystywane w programie
1.3.3. Procedura inicjalizacji danych dla elementu
Wypełnienie zmiennej mEL4 typu ELEM odbywa się w programie IniEL4 pokazanym na rys. 9.5. W pierwszej części programu zadano liczbę węzłów elementu nbn równą 4. Wybrany schemat całkowania numerycznego zawiera 4 punkty, tak jak na rys. 4.19, dlatego zadano N_p=4. Przydzielono pamięć macierzom N1, N2, Nf, P, W oraz L. Następnie wypełniono współrzędne lokalne punktów całkowania zgodnie z rys. 4.19. Obliczono w każdym punkcie całkowania wartości N1, N2 i Nf wykorzystując wzory (4.9).
Analogicznie wypełniono struktury dla 4 powierzchni wybranego elementu.
Przy wykorzystaniu innego typu elementów skończonych jest wymagana zmiana struktury mEL4 i siatki elementów.
SUBROUTINE IniEL4();
! ******************************************************************
! Inicjalizacja danych dla elementu
! Milenin
Andre, AGH, 2008, milenin@agh.edu.pl
!
******************************************************************
use GlobData;
implicit
none;
REAL*8 :: Alfa,L1,L2,e,n,SN;
integer*4
:: iP,i;
Alfa
= 1/(sqrt(4.0));
mEL4%nbn=4;
mEL4%N_p=4;
ALLOCATE(mEL4%N1(
mEL4%nbn, mEL4%N_p ));
ALLOCATE(mEL4%N2(
mEL4%nbn, mEL4%N_p ));
ALLOCATE(mEL4%Nf(
mEL4%nbn, mEL4%N_p ));
ALLOCATE(mEL4%P
( mEL4%N_p ));
ALLOCATE(mEL4%W
( mEL4%N_p ));
ALLOCATE(mEL4%L
( mEL4%nbn ));
mEL4%W
= 1.0;
mEL4%P(1)%E
= -Alfa;
mEL4%P(1)%N
= -Alfa;
mEL4%P(2)%E
= Alfa;
mEL4%P(2)%N
= -Alfa;
mEL4%P(3)%E
= Alfa;
mEL4%P(3)%N
= Alfa;
mEL4%P(4)%E
= -Alfa;
mEL4%P(4)%N
= Alfa;
mEL4%L(1)%E
= -1;
mEL4%L(1)%N
= -1;
mEL4%L(2)%E
= 1;
mEL4%L(2)%N
= -1;
mEL4%L(3)%E
= 1;
mEL4%L(3)%N
= 1;
mEL4%L(4)%E
= -1;
mEL4%L(4)%N
= 1;
DO
iP = 1, mEL4%N_p
L1
= mEL4%P(iP)%E
L2 =
mEL4%P(iP)%N
mEL4%Nf(1,iP)
= 0.25*(1-L1)*(1-L2);
mEL4%N1(1,iP)
= -0.25*(1-L2);
mEL4%N2(1,iP)
= -0.25*(1-L1);
mEL4%Nf(2,iP)
= 0.25*(1+L1)*(1-L2);
mEL4%N1(2,iP)
= 0.25*(1-L2);
mEL4%N2(2,iP)
= -0.25*(1+L1);
mEL4%Nf(3,iP)
= 0.25*(1+L1)*(1+L2);
mEL4%N1(3,iP)
= 0.25*(1+L2);
mEL4%N2(3,iP)
= 0.25*(1+L1);
mEL4%Nf(4,iP)
= 0.25*(1-L1)*(1+L2);
mEL4%N1(4,iP)
= -0.25*(1+L2);
mEL4%N2(4,iP)
= 0.25*(1-L1);
end
do;
DO i
= 1, 4
mEL4%Sf(i)%N_p
= 2;
ALLOCATE(
mEL4%Sf(i)%P( mEL4%Sf(i)%N_p ) );
ALLOCATE(
mEL4%Sf(i)%W( mEL4%Sf(i)%N_p ) );
mEL4%Sf(i)%W
= 1;
ALLOCATE(
mEL4%Sf(i)%N1( mEL4%nbn, mEL4%Sf(i)%N_p));
ALLOCATE(
mEL4%Sf(i)%N2( mEL4%nbn, mEL4%Sf(i)%N_p));
ALLOCATE(
mEL4%Sf(i)%Nf( mEL4%nbn, mEL4%Sf(i)%N_p));
ALLOCATE(
mEL4%Sf(i)%UZEL( 2 ) );
END
DO;
mEL4%Sf(1)%UZEL(1)
= 4; mEL4%Sf(1)%UZEL(2) = 1;
mEL4%Sf(2)%UZEL(1)
= 1; mEL4%Sf(2)%UZEL(2) = 2;
mEL4%Sf(3)%UZEL(1)
= 2; mEL4%Sf(3)%UZEL(2) = 3;
mEL4%Sf(4)%UZEL(1)
= 3; mEL4%Sf(4)%UZEL(2) = 4;
mEL4%Sf(1)%P(1)%N=Alfa; mEL4%Sf(1)%P(1)%E=-1;
mEL4%Sf(1)%P(2)%N=-Alfa; mEL4%Sf(1)%P(2)%E=-1;
mEL4%Sf(2)%P(1)%N=-1; mEL4%Sf(2)%P(1)%E=-Alfa;
mEL4%Sf(2)%P(2)%N=-1; mEL4%Sf(2)%P(2)%E=Alfa;
mEL4%Sf(3)%P(1)%N=-Alfa; mEL4%Sf(3)%P(1)%E=1;
mEL4%Sf(3)%P(2)%N=Alfa; mEL4%Sf(3)%P(2)%E=1;
mEL4%Sf(4)%P(1)%N=1; mEL4%Sf(4)%P(1)%E=Alfa;
mEL4%Sf(4)%P(2)%N=1; mEL4%Sf(4)%P(2)%E=-Alfa;
do
i = 1, 4
DO
iP = 1, 2
e
= mEL4%Sf(i)%P(ip)%E;
n
= mEL4%Sf(i)%P(ip)%N;
mEL4%Sf(i)%Nf(1,ip)
= 0.25*(1-e)*(1-n);
mEL4%Sf(i)%Nf(2,ip)
= 0.25*(1+e)*(1-n);
mEL4%Sf(i)%Nf(3,ip)
= 0.25*(1+e)*(1+n);
mEL4%Sf(i)%Nf(4,ip)
= 0.25*(1-e)*(1+n);
mEL4%Sf(i)%N1(1,ip)
= -0.25*(1-n);
mEL4%Sf(i)%N1(2,ip)
= 0.25*(1-n);
mEL4%Sf(i)%N1(3,ip)
= 0.25*(1+n);
mEL4%Sf(i)%N1(4,ip)
= -0.25*(1+n);
mEL4%Sf(i)%N2(1,ip)
= -0.25*(1-e);
mEL4%Sf(i)%N2(2,ip)
= -0.25*(1+e);
mEL4%Sf(i)%N2(3,ip)
= 0.25*(1+e);
mEL4%Sf(i)%N2(4,ip)
= 0.25*(1-e);
END
DO;
end do;
END
SUBROUTINE IniEL4;
Rys. 9.5. Inicjalizacja danych dla elementu skonczonego
1.3.4. Procedury wczytywania danych i przydzielenia pamięci dla macierzy
Program do wczytywania danych jest pokazany na rys. 9.6. Program ten otwiera plik tekstowy indata.t2d, którego struktura jest opisana w podrozdziale 9.2.
Subroutine
InpData();
!
******************************************************************
! Wczytywanie danych
! Milenin
Andre, AGH, 2008, milenin@agh.edu.pl
!
******************************************************************
use GlobData;
implicit none;
integer nFile,i,j,iost;
nFile = 89
OPEN
(nFile, FILE='indata.t2d', action='read')
read(nFile, *);
read(nFile, *);
read(nFile, *);
read(nFile, *);
read(nFile, *) mTbegin;
read(nFile, *) mTime;
read(nFile, *) mdTime;
read(nFile, *) mT_otoczenia;
read(nFile, *) mAlfa;
read(nFile, *) mH0;
read(nFile, *) mB0;
read(nFile, *) mNhH;
read(nFile, *) mNhB;
read(nFile, *) mC;
read(nFile, *) mK;
read(nFile, *) mR;
close (nFile);
end Subroutine InpData
Rys. 9.6. Program do wczytywania danych.
Przydzielenie pamięci dla macierzy odbywa się poprzez obliczenie szerokości mLDA macierzy sztywności za pomocą mapy elementów oraz przydzielenie pamięci zmiennym mA (globalna macierz sztywności), mX (wektor niewiadomych) i mB (wektor obciążeń). W celach metodycznych pokazano, jak przydzielić pamięć dla pełnej matrycy o wymiarach nh*nh. Ten wariant prowadzi do nieskutecznego wykorzystania pamięci, ale jest prostszy do zrozumienia.
SUBROUTINE ALLOCATE_Matrix;
use GlobData;
implicit none;
integer*4 :: NEL, i, j, ii, jj, jB, nk(4),NeMaxB, ierr;
mLDA=0;
do
NEL = 1,mGr%ne
do
i=1,mEL4%nbn
nk(i)
= mGr%EL(NEL)%nop(i);
end do;
do
i=1,mEL4%nbn
! * ii -
wiersz *
ii=nk(i);
do j=1,mEL4%nbn
! * jj - kolumna *
jj=nk(j);
jB = jj-ii+1;
if(jB>=mLDA) then
mLDA=jB;
NeMaxB = NEL;
end if;
end do;
end do;
end do;
ALLOCATE
( mA(mLDA, mGr%nh), STAT=iErr );
! ALLOCATE
( mA(mGr%nh, mGr%nh), STAT=iErr );
! Pelna matryca MES
ALLOCATE
( mB(mGr%nh), STAT=iErr );
ALLOCATE
( mX(mGr%nh), STAT=iErr );
END SUBROUTINE
ALLOCATE_Matrix
Rys. 9.7. Program do obliczenia pamięci potrzebnej dla
globalnej macierzy sztywności.
1.3.5. Procedura rozwiązywania zadania dla bieżącego kroku czasowego
Program do rozwiązywania zadania dla bieżącego kroku czasowego jest pokazany na rys. 9.8.
SUBROUTINE SOLVER( );
! ******************************************************************
!
Solver
! Milenin Andre, AGH, 2008, milenin@agh.edu.pl
!
******************************************************************
use GlobData;
use msimsl;
implicit
none;
integer*4 :: NEL;
integer*4, dimension(4)
:: nk;
integer*4
:: jB,iB,NeMaxB,NCODA,i,j,ii,jj;
integer*4 :: iErr;
mA=0; mB=0; mX=0;
do
NEL=1, mGr%ne
do
i=1, mEL4%nbn
nk(i)
= mGr%EL(NEL)%nop(i);
end do;
CALL
FeSM_heat( NEL );
do
i=1, mEL4%nbn
ii = nk(i); ! wiersz w macierzy pełnej
do j=1, mEL4%nbn
jj = nk(j);
! Kolumna w macierzy pełnej
iB = mLDA + ii - jj;! Wiersz w macierzy pasmowej
if ((jj>=ii).AND.(iB<=mLDA))
then
mA(iB, jj)
= mA(iB, jj) + est(i,j); ! Wypełnienie macierzy pasmowej
end if;
! mA(ii,jj)
= mA(ii,jj) + est(i,j); ! Wypełnienie macierzy pełnej
end do;
mB(ii)
= mB(ii) + r(i);
end
do;
end
do;
NCODA
= mLDA-1;
CALL
DLSAQS (mGr%nh, mA, mLDA, NCODA, mB, mX)
! Program do
rozwiązania układu równań z macierzą pasmową
! NCODA=1;
! CALL DLSARG (mGr%nh, mA, mGr%nh, mB,
NCODA, mX)
! Program do
rozwiązania układu równań z macierzą pełną
do i=1, mGr%nh
mGr%nd(i)%CR = ( mGr%nd(i)%t-mX(i) ) / mdTime;
mGr%nd(i)%t = mX(i);
end do;
END
SUBROUTINE SOLVER;
Rys. 9.8. Program do wypełnienia macierzy globalnej i rozwiązania układu
równań MES
W tym programie oznaczenia zmiennych są następujące:
NEL – bieżący numer elementu;
Nk – macierz zawierającą mapę bieżącego elementu;
FeSM_heat – program wypełnienia macierzy i wektora obciążeń bieżącego elementu NEL;
DLSAQS – program rozwiązania układu równań z macierzą pasmową;
DLSARG – program rozwiązania układu równań z pełną matrycą (podano jako komentarz w celach metodycznych).
1.3.6. Procedura wypełnienia macierzy sztywności i wektora obciążeń
Program FeSM_heat (rys. 9.9) zawiera dwie części:
PRE_heat_mat – wypełnia macierz i wektor obciążeń;
PRE_heat_pov_mat – uwzględnia warunki brzegowe.
SUBROUTINE FeSM_heat(
NEL );
! ******************************************************************
! Generacja macierzy elementu NEL
! Milenin Andre, AGH, 2008, milenin@agh.edu.pl
!
******************************************************************
use GlobData;
implicit none;
integer*4 :: NEL; ! Numer bieżącego Elementu
est = 0;
r
= 0;
call PRE_heat_mat(
NEL );
call PRE_heat_pov_mat(NEL );
END
SUBROUTINE FeSM_heat;
Rys. 9.9. Program do
obliczenia macierzy sztywności bieżącego elementu (NEL)
Program PRE_heat_mat pokazano na rys. 9.10. Program Jacob_2d zostaje wywołany, co zostało opisane w rozdziale 4.6 i podane w uproszczonej postaci na rys. 4.26. Program ten realizuje typowy algorytm wypełnienia macierzy jednego elementu, który został wielokrotnie opisany w niniejszym opracowaniu. W tekście programu są podane odwołania do wzorów, które są wykorzystywane podczas obliczania składowych macierzy.
subroutine PRE_heat_mat(
NEL );
use GlobData;
implicit none;
integer*4 :: NEL;
INTEGER*4 ::
I,j,N,P,Id;
REAL*8, DIMENSION(2,2) :: J_,J_inv; ! Macierz Jakobiego
i macierz odwrotna
REAL*8 :: DetJ,Ni,Nn,Hin,Cin;
real*8 ::
T0p;
REAL*8, DIMENSION(4) :: Ndx,Ndy; ! Pochodne funkcji
kształtu względem X i Y
REAL*8, DIMENSION(4)
:: X,Y,Temp_0;
DO
I=1,mEL4%NBN
Id
= ABS( mGr%EL(NEL)%NOP(I) );
X(I) = mGr%nd(Id)%x /1000.0; ! [m]
Y(I) = mGr%nd(Id)%y /1000.0; ! [m]
Temp_0(i)=
mGr%nd(Id)%t;
END
DO
DO
P=1, mEL4%N_p
CALL Jacob_2d(J_, J_inv, P, mEL4%N_p, mEL4%NBN,
mEL4%N1,mEL4%N2, X, Y, DetJ);
T0p=0;
DO
i=1, mEL4%NBN
Ndx(i)=mEL4%N1(i,p)*J_inv(1,1) +
mEL4%N2(i,p)*J_inv(1,2) ! [m-1]
Ndy(i)=mEL4%N1(i,p)*J_inv(2,1)
+ mEL4%N2(i,p)*J_inv(2,2) ! [m-1]
Ni
= mEL4%Nf(i,p);
T0p = T0p +
Temp_0(i)*Ni;
END DO;
detJ = abs(detJ)*mEL4%W(p); ! [m2]
DO N=1,mEL4%NBN
DO
I=1,mEL4%NBN
Ni = mEL4%Nf(i,p);
Nn = mEL4%Nf(n,p);
Hin = mK*(Ndx(n)*Ndx(i)
+ Ndy(n)*Ndy(i))*DetJ; ! Wzór
(4.14)
Cin = mC*mR*Nn*Ni*detJ; ! Wzór
(5.3)
est(n,i) = est(n,i) + Hin +
Cin/mdTime; ! Wzór (5.8)
r(n) = r(n) + (Cin/mdTime)*T0p;
END DO
! Q
= 0.8*Tp*Hp
! r(n)=r(n)
+ Nn*Q*DetJ;
END DO
END
DO
end subroutine PRE_heat_mat;
Rys. 9.10. Program do obliczenia składowych macierzy sztywności bieżącego
elementu NEL.
1.3.7. Procedura z warunkami brzegowymi
Program uwzględniający warunki brzegowe w macierzy sztywności elementu pokazano na rys. 9.11. W programie dla bieżącego elementu jest realizowana pętla po powierzchniach styku tego elementu z otoczeniem (ich liczba jest równa mGr%EL(NEL)%nPov). Następnie zachodzi całkowanie po każdej powierzchni za pomocą wybranego w programie IniEL4 schematu całkowania. W tekście programu podane są odwołania do wzorów wykorzystywanych podczas obliczania poprawek do składowych macierzy i wektora obciążeń.
subroutine PRE_heat_pov_mat(
NEL );
!
****************************************************
! WARUNKI
BRZEGOWE
! Milenin
Andre, AGH, 2008, milenin@agh.edu.pl
! ****************************************************
use GlobData;
implicit
none;
integer*4 :: NEL;
INTEGER*4 :: I,j,N,P,Id,iPov;
REAL*8 ::
DetJ,Ni,Nn,Pn;
REAL*8, DIMENSION(4) :: X,Y;
DO I=1,4
Id
= ABS(mGr%EL(NEL)%NOP(I));
X(I) = mGr%nd(Id)%x /1000.0; ! [m]
Y(I) = mGr%nd(Id)%y /1000.0; ! [m]
END
DO
DO
iPov=1, mGr%EL(NEL)%nPov
id =
mGr%EL(NEL)%aPov(iPov); ! Lokalny
numer powierzchni elementu
SELECT
CASE (id)
case(1)
DetJ=sqrt(
(X(4)-X(1))**2 + (Y(4)-Y(1))**2 );
case(2)
DetJ=sqrt(
(X(1)-X(2))**2 + (Y(1)-Y(2))**2 );
case(3)
DetJ=sqrt(
(X(2)-X(3))**2 + (Y(2)-Y(3))**2 );
case(4)
DetJ=sqrt(
(X(3)-X(4))**2 + (Y(3)-Y(4))**2 );
END
SELECT
DO
P=1, 2
DO
n=1, 4
! Pętla po grupach równań równych wierszom macierzy
DO
i=1, 4
! Pętla po kolumnach macierzy
Ni =
mEL4%Sf(id)%Nf(i,p);
Nn = mEL4%Sf(id)%Nf(n,p);
est(n,i)
= est(n,i) + mAlfa*Nn*Ni*DetJ; !
Wzór (4.14)
END DO
Pn = mAlfa*mT_otoczenia*Nn*DetJ; ! Wzór (4.15)
R(n)
= R(n) + Pn;
END
DO
END
DO ! P
END
DO; ! iPov
end subroutine PRE_heat_pov_mat;
Rys. 9.11. Program uwzględniający warunki brzegowe w macierzy sztywności
elementu.
1.4. Przykład obliczeń
Wyniki obliczeń dla danych, które zamieszczono na rys. 9.1 są podane na rys. 9.12 dla punktu zlokalizowanego w środku przekroju (krzywa 1) i na jego powierzchni (krzywa 2).

Rys. 9.12. Przykład wyników obliczeń dla punktu zlokalizowanego w środku
przekroju (krzywa 1) i na jego powierzchni (krzywa 2).
1.5. Pytania kontrolne
1. Uruchomić opisaną wersje programu na podstawie projektu, który należy pobrać z Internetu. Następnie wykonać testowe obliczenia. Przykładowy wynik testowy jest pokazany na rys. 9.12.
2. Napisać program z inicjalizacją danych dla elementu typu simpleks.
3. Napisać program z inicjalizacją danych dla elementu drugiego rzędu, który pokazano na rys. 4.12 przy wykorzystaniu schematu całkowania, jaki pokazano na rys. 4.20.
4. Napisać swój program do generacji siatki elementów drugiego rzędu (rys. 4.12) dla zadania 3.
1.6. Funkcje kształtu elementów wyższego rzędu
Rozpatrzmy kilka elementów wyższego rzędu. W praktyce rzadko stosowane są elementy rzędu wyższego niż drugi, dlatego w dalszej analizie będą rozpatrywane izoparametryczne elementy drugiego rzędu.
Jednym z popularnych elementów jest element typu serendypowego (ang. serendipity family elements), rys. 4.11.

a) b)
Rys. 4.11. Numeracja węzłów dwuwymiarowego 8- węzłowego elementu skończonego w
układzie globalnym (a) i lokalnym (b).

a)
b)
Rys. 4.12. Numeracja węzłów dwuwymiarowego 9- węzłowego elementu skończonego w
układzie globalnym (a) i lokalnym (b).
Funkcje kształtu tego elementu w układzie lokalnym są zapisane w następujący sposób:
![]()
![]()
![]()
![]()
![]()
![]() (4.21)
(4.21)
![]()
![]() .
.
Klasyczny element drugiego rzędu typu Lagrange'a zawiera 9 węzłów (rys. 4.12). Funkcje kształtu tego elementu w układzie lokalnym mają następującą postać:
 (4.22)
(4.22)
Schemat całkowania

a) b)
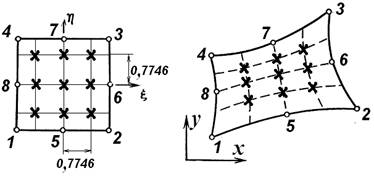
Rys. 4.20. Współrzędne punktów całkowania Gaussa dla
całkowania numerycznego elementu drugiego rzędu w układzie a) lokalnym, b) globalnym