III. DYNAMIKA
7. Dynamika ruchu postępowego
Mechanika klasyczna opiera się na trzech podstawowych prawach noszących nazwę zasad dynamiki Newtona.
Przykładowe sformułowania tych zasad:
I. Istnieje taki układ odniesienia, w którym, jeżeli na ciało nie działa żadna siła lub siły działające na to ciało równoważą się, to ciało zachowuje stan spoczynku lub porusza się ruchem jednostajnym po linii prostej.
Układy odniesienia, o których
mówi I zasada noszą nazwę układów inercjalnych.
II. Jeżeli na ciało o masie m
działają siły o wypadkowej ![]() , to ciało
porusza się ruchem przyspieszonym z przyśpieszeniem
, to ciało
porusza się ruchem przyspieszonym z przyśpieszeniem ![]() takim, że
takim, że
![]() (7.1)
(7.1)
W/w zasady mówią o jednym ciele, jednak w zadaniach zwykle mamy do czynienia z układami co najmniej dwóch ciał działających nawzajem na siebie i wtedy stosujemy III zasadę:
III. Jeżeli na ciało A działa na
ciało B siłą ![]() , to ciało B
oddziałuje na ciało A taką samą co do wartości siłą
, to ciało B
oddziałuje na ciało A taką samą co do wartości siłą ![]() , lecz skierowaną przeciwnie.
, lecz skierowaną przeciwnie.
Siły te są jednakowe co do
wartości i skierowane przeciwnie, lecz nie znoszą się ani nie równoważą, gdyż
są przyłożone do różnych ciał.
Wskazówka:
Przy rozwiązywaniu zadań z dynamiki zwracamy uwagę na kolejność czynności tj. :
1. wykonujemy rysunek, wyraźnie zaznaczając odrębność ciał tworzących układ;
2. badamy, jakie siły działają na poszczególne ciała tworzące siły i rysujemy te siły;
3. przyjmujemy układ odniesienia, w którym będziemy zapisywać równania ruchu: wybór uzależniamy od treści zadania;
4. zapisujemy dla każdego ciała osobno równanie II zasady dynamiki.
Przykład:
Kontener na wadze elektronicznej przedstawione są na rysunku 7.1:
Kontener A i wagę B traktujemy jako dwa odrębne ciała. Analizujemy jakie siły działają na ciała i gdzie są one przyłożone:
1. w
środku masy ciała A przyłożona jest siła ciężkości m![]()
2. siła
m![]() dociska ciało A do ciała B, a więc ciało A działa na
ciało b siłą
dociska ciało A do ciała B, a więc ciało A działa na
ciało b siłą ![]() ; siła ta jest przyłożona do wagi (rys 7.1). Zauważamy,
że co do wartości mg = NAB.
; siła ta jest przyłożona do wagi (rys 7.1). Zauważamy,
że co do wartości mg = NAB.
3. zgodnie
z III zasadą dynamiki ciało B oddziałuje na A siłą ![]() . Siła ta jest przyłożona do kontenera (rys.7.1). Co do
wartości siły NAB i NBA są takie same.
. Siła ta jest przyłożona do kontenera (rys.7.1). Co do
wartości siły NAB i NBA są takie same.
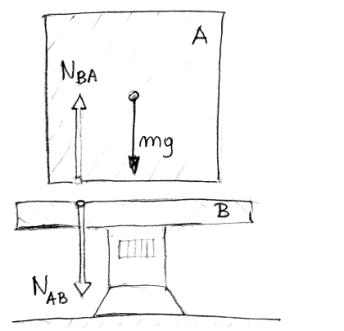
Rys.7.1.
Kontener spoczywający na wadze – u kład sił
Skutki działania sił:
Z powyższej analizy wynika, że wartości sił są takie same, tzn mg=NAB=NBA.
Natomiast wektory sił ![]() i
i ![]() leżą na tym samym
kierunku i są przeciwnie skierowane, a ponieważ zaczepione są to tego samego
ciała A, w rezultacie równoważą się i kontener pozostaje w spoczynku. Siła
leżą na tym samym
kierunku i są przeciwnie skierowane, a ponieważ zaczepione są to tego samego
ciała A, w rezultacie równoważą się i kontener pozostaje w spoczynku. Siła ![]() oddziałuje z
sensorem wagi, która wskazuje wynik ważenia.
oddziałuje z
sensorem wagi, która wskazuje wynik ważenia.
W większości zadań z dynamiki występujące w nich siły można sprowadzić do sił grawitacji, sił sprężystego oddziaływania i sił tarcia. W wielu zadaniach ciała oddziałują ze sobą za pośrednictwem sprzęgów (nici, liny) i wtedy występują siły naciągu np. liny.
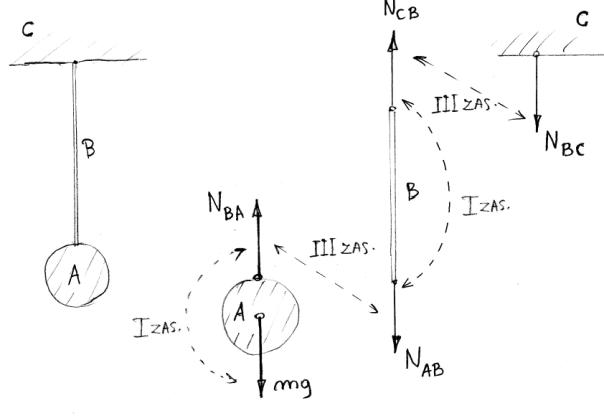
Rys.7.2.
Przenoszenie sił poprzez sprzęgi, nitki, liny
Przykład:
Na rysunku 7.2 przedstawiono lampę (A) na sznurze(B) przymocowaną do stropu(C).
1. Na
lampę A działa siła przyciągania ziemskiego mg
i równoważąca ją siła ![]() przyłożona od
strony sznura do lampy. Siły te są sobie równe, przeciwnie skierowane, a
ponieważ są przyłożone do tego samego ciała, więc się równoważą (mg=NBA)
i lampa pozostaje w spoczynku (I zas.)
przyłożona od
strony sznura do lampy. Siły te są sobie równe, przeciwnie skierowane, a
ponieważ są przyłożone do tego samego ciała, więc się równoważą (mg=NBA)
i lampa pozostaje w spoczynku (I zas.)
2. Lampa
–sznur; Sznur działa na lampę siłą ![]() skierowaną do
góry. Jak wynika z III zasady, od strony lampy na sznur działa siła
skierowaną do
góry. Jak wynika z III zasady, od strony lampy na sznur działa siła ![]() ,. Jednocześnie wartości tych sił są takie same, a zwroty
skierowane przeciwnie (rys). Siły te nie mogą się znosić, ponieważ przyłożone
są do różnych ciał!
,. Jednocześnie wartości tych sił są takie same, a zwroty
skierowane przeciwnie (rys). Siły te nie mogą się znosić, ponieważ przyłożone
są do różnych ciał!
3. Sznur;
Na sznur działa siła ![]() od strony lampy i
taka sama co do wartości, ale skierowana przeciwnie, przyłożona od strony
stropu siła
od strony lampy i
taka sama co do wartości, ale skierowana przeciwnie, przyłożona od strony
stropu siła ![]() . Siły te równoważą się ponieważ przyłożone są do tego
samego ciała i sznur pozostaje w spoczynku (I zas.)
. Siły te równoważą się ponieważ przyłożone są do tego
samego ciała i sznur pozostaje w spoczynku (I zas.)
Wartość NAB=NAC nazywamy naciągiem (napięciem) sznura
4. Sznur-strop.
Strop działa na sznur siłą ![]() , a sznur na
strop zgodnie z III zasadą siłą
, a sznur na
strop zgodnie z III zasadą siłą ![]() . Więc siły te mają taką samą wartość, są przeciwnie
skierowane lecz nie znoszą się, bo działają na różne ciała.
. Więc siły te mają taką samą wartość, są przeciwnie
skierowane lecz nie znoszą się, bo działają na różne ciała.
Analiza sił tarcia posuwistego
Zapamiętajmy:
Siła tarcia ![]() działa na ciało
zawsze w płaszczyźnie styku z powierzchnią, po której ciało się posuwa i jest
zawsze skierowana przeciwnie do ruchu części trących. Zgodnie z III zasadą; na
podłoże po którym porusza się ciało, działa siła
działa na ciało
zawsze w płaszczyźnie styku z powierzchnią, po której ciało się posuwa i jest
zawsze skierowana przeciwnie do ruchu części trących. Zgodnie z III zasadą; na
podłoże po którym porusza się ciało, działa siła ![]() . Wartości tych sił są takie same, siły te mają przeciwne
zwroty, ale nie znoszą się i nie równoważą bo są przyłożone do różnych ciał
(patrz rysunek 7.3).
. Wartości tych sił są takie same, siły te mają przeciwne
zwroty, ale nie znoszą się i nie równoważą bo są przyłożone do różnych ciał
(patrz rysunek 7.3).
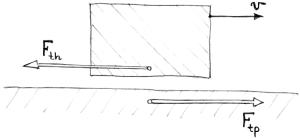
Rys.7.3.
Siła tarcia
W zadaniach przyjmujemy, że
wartość siły tarcia posuwistego zależy od współczynnika tarcia m , charakteryzującego powierzchnie trące, oraz od
nacisku ![]() . Nacisk określamy jako siłę, lub składową od innych sił,
prostopadle przyciskającą ciało do powierzchni, po której się porusza. Wartość
siły tarcia wynosi wtedy
. Nacisk określamy jako siłę, lub składową od innych sił,
prostopadle przyciskającą ciało do powierzchni, po której się porusza. Wartość
siły tarcia wynosi wtedy ![]() .
.
Przykłady:
1. Przedstawienie
graficzne sił występujących w trakcie zsuwania i klocka pod wpływem siły
ciężkości ![]() po bieżni
pochylonej pod kątem a.
po bieżni
pochylonej pod kątem a.
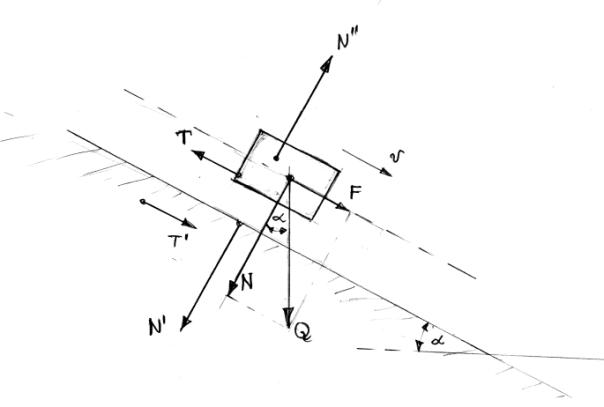
Rys.7.4. Układ sił na równi pochyłej
2. Działanie sił tarcia w trakcie ruchu samochodu posiadającego napęd na oś przednią.

Rys.7.5. Siły tarcia podczas ruchu samochodu
W prawidłowym analizowaniu sił i zapisywaniu równań ruchu pomaga stosowanie następujących pojęć fizycznych:
- Układ ciał
Układem ciał w fizyce nazywamy zbiór ciał, myślowo wyodrębniony od otoczenia
Jeżeli ciała stanowiące otoczenie nie wywierają sił na w/w zbiór ciał tzn. układ (albo gdy działania zewnętrznych ciał się znoszą), uważamy wtedy, że układ jest izolowany lub – odosobniony.
- Siły zewnętrzne
Siłami zewnętrznymi nazywamy te siły, które działają na układ z zewnątrz, tzn. od strony ciał nie należących do układu.
- Siły wewnętrzne
Siłami wewnętrznymi nazywamy te siły, które działają między ciałami tworzącymi układ
Zapamiętajmy:
Dynamiczne równania ruchu opisujące rozważany problem uzyskuje się poprzez znalezienie wszystkich sił działających na poszczególne ciała (masy) występujące w zadaniu i zapisując relacje wynikające z II zasady dla poszczególnych ciał (mas). Uzyskujemy wtedy układ równań rozwiązanie którego daje oczekiwany wynik.
8. Dynamika w nieinercjalnych układach
odniesienia
Zapamiętajmy:
Nieinercjalny układ odniesienia przemieszcza się z przyśpieszeniem.
Obserwator związany z nieinercjalnym układem odniesienia nie może do opisu zachowania się ciał zastosować I zasady dynamiki.
Aby wytłumaczyć zachowanie się
ciał w tym układzie za pomocą zasad dynamiki, obserwator musi wprowadzić siłę pozorną,
tzw. siłę bezwładności ![]() , która jest skierowana przeciwnie niż przyśpieszenie układu.
Siła ta istnieje tylko w układzie nieinercjalnym i nadaje ciału w tym układzie
przyspieszenie
, która jest skierowana przeciwnie niż przyśpieszenie układu.
Siła ta istnieje tylko w układzie nieinercjalnym i nadaje ciału w tym układzie
przyspieszenie ![]() . Tzn.
. Tzn. ![]() , gdzie
, gdzie ![]() jest przyspieszeniem
układu.
jest przyspieszeniem
układu.
Wskazówka:
Należy zwrócić uwagę na istotne zjawisko, mianowicie, że pozorna siła bezwładności jest zawsze skierowana przeciwnie skierowana do przyśpieszenia (opóźnienia) układu odniesienia, a nie zależy od tego, w którą stronę układ się porusza.
Przykład:
Na wadze elektronicznej, znajdującej się w windzie położono ciało o masie m. Jakie będą wskazania wagi, jeżeli winda jedzie z przyspieszeniem a do góry:
a. Jak uzasadni odpowiedzi obserwator A przebywający w inercjalnym układzie odniesienia,
b. obserwator B znajdujący się w windzie ( w nieinercjalnym układzie odniesienia)
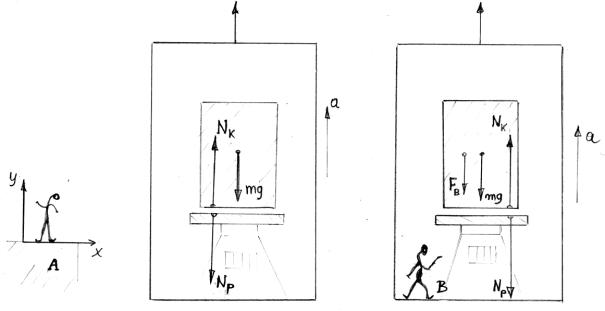
Rys.8.1. Winda – układ inercjalny i nieinercjalny
Obserwator A,
Związany z układem inercjalnym (XY – rysunek 8.1 ) spostrzega, że na ciało działają:
-
siła ciężkości ![]() skierowana w dół,
skierowana w dół,
-
siła ![]() przyłożona od strony
szalki wagi,
przyłożona od strony
szalki wagi,
na szalkę działa siła ![]() . rejestrowana przez sensor wagi. Jednocześnie co do wartości
. rejestrowana przez sensor wagi. Jednocześnie co do wartości
NK=Np (8.1)
Obserwator A układa równania (II zasada) dla masy m, która porusza się z przyśpieszeniem a;
NK – mg = ma (8.2)
NK = m(g + a) (8.3)
Więc wskazanie wagi wynosi:
NP = NK = m(g + a) (8.4)
Obserwator B,
Związany z układem nieinercjalnym
(winda porusza się z przyśpieszeniem a ) uwzględnia działanie siły bezwładności
![]() na masę m, a ponieważ
masa m jest względem niego w spoczynku pisze równania równowagi sił pamiętając,
że
na masę m, a ponieważ
masa m jest względem niego w spoczynku pisze równania równowagi sił pamiętając,
że ![]() (skierowana
przeciwnie do przyspieszenia windy):
(skierowana
przeciwnie do przyspieszenia windy):
NK = mg + ma
Wskazanie wagi wynosi
NP = NK = m(g + a)
Jak widać, w obu przypadkach obserwatorzy wykonają identyczny pomiar.
Literatura:
[1] M.A.Herman, A.Kalestyński, L.Widomski, Podstawy fizyki dla kandydatów na wyższe uczelnie i studentów, PWN Warszawa 1999
[2] D.Halliday, R.Resnick, J.Wlker, Podstawy Fizyki tom 1, PWN, Warszawa 2005