11. DYNAMIKA RUCHU DRGAJĄCEGO
Ruchem drgającym nazywamy ruch, który powtarza się periodycznie w trakcie jego trwania w czasie i zachodzi wokół położenia równowagi. Zespół obiektów fizycznych zapewniający wytworzenie ruchu drgającego nazywamy układem drgającym.
W każdym układzie drgającym, aby układ mógł wykonywać drgania musi być spełniony podstawowy warunek polegający na tym, że każdemu wychyleniu układu z położenia równowagi musi towarzyszyć siła skierowana przeciwnie do wychylenia, tzn. skierowana w stronę położenia równowagi. Siłę tę nazywamy kierującą lub zawracającą.
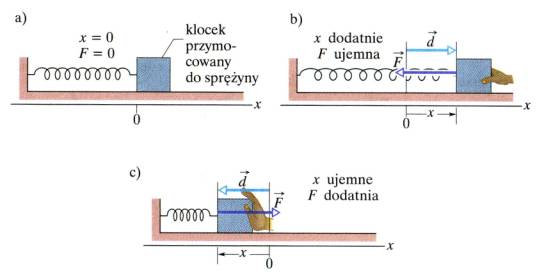
Rys. 11.1. a) Sprężyna nieodkształcona. Jak początek
osi X przybieramy położenie tego końca sprężyny, do którego położony jest
klocek. b) Przemieszczamy klocek o d przy czym sprężyna zostaje rozciągnięta w
kierunku dodatnich x. Zwrócić uwagę na siłę zwrotną działającą na klocek. c)
Sprężyna zostaje ściśnięta – zwrócić uwagę na siłę zwrotną.
Energia w ruchu drgającym
Jednowymiarowy ruch drgający powodowany jest siłą:
![]()
Praca tej siły na drodze x wynosi
![]()
a po zróżniczkowaniu
![]()
Całkowanie graficzne sprowadza się do policzenia pola powierzchni pod krzywą – rys. 11.2
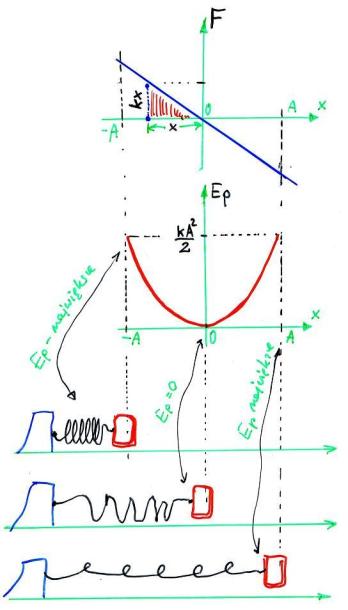
Rys. 11.2. Zależność siły od wychylenia, praca jako
całka (pole zakreskowanego trójkąta) , wykres energii potencjalnej w funkcji
położenia ciała.
Energia
potencjalna (analitycznie)
Czasowe
przebiegi parametrów ruchu i energii w ruchu drgającym
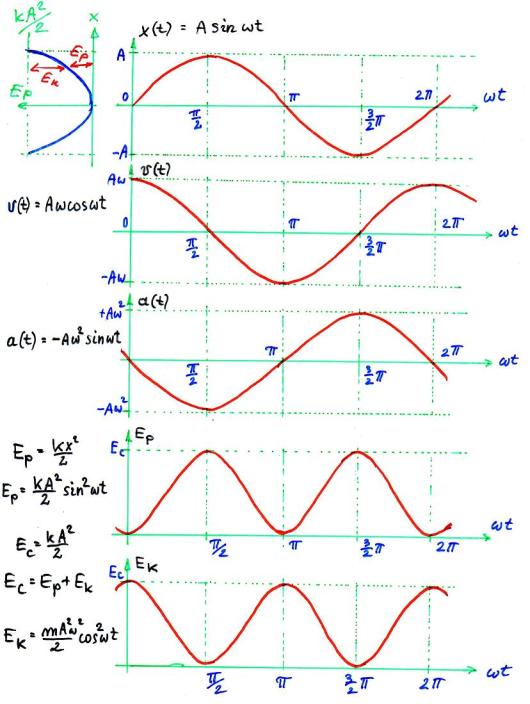
Rys. 11.3. Czasowe przebiegi położenia, prędkości i
przyspieszenia punktu materialnego w ruchu drgającym. Energia potencjalna i
energia kinetyczna.
12. Dynamika ruch po torach
kołowych
W zjawiskach przyrodniczych i urządzeniach technicznych bardzo często spotykamy się z ruchem obrotowym.
Określenia:
Ciało sztywne – to ciało, które porusza się w taki sposób, że wszystkie jego części są związane ze sobą dzięki czemu kształt ciała nie ulega zmianie.
Stała oś – obrót zachodzi wokół osi, której położenie nie zmienia się w czasie ruchu ciała, i tę oś nazywamy osią obrotu.
Ruch obrotowy – Każdy punkt ciała sztywnego porusza się po okręgu, którego środek leży na osi obrotu i każdy punkt zakreśla w ustalonym czasie taki sam kąt.
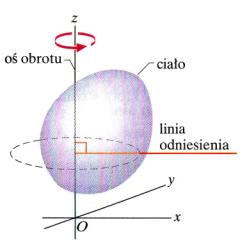
Rys. 12.1.
Ciało sztywne o dowolnym kształcie obracające się wokół osi z układu
współrzędnych. Linia odniesienia została wybrana w obrębie ciała dowolnie, z
tym że prostopadła do osi obrotu. Jest ona związana z ciałem i obraca się razem
z nim.
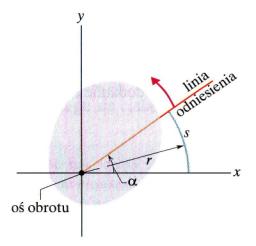
Rys. 12.2.
Przekrój płaszczyzną xy obracającego się ciała w rysunku 12.1 (czyli
jego widok z góry). Płaszczyzna przekroju jest prostopadła do osi obrotu, która
jest teraz skierowana prostopadle go kartki, w kierunku patrzącego. Położenie
ciała jest określone przez kąt a jaki tworzy linia odniesienia z osią x.
![]() (12.1)
(12.1)
1 pełny obrót = 360°=![]() rad (12.2)
rad (12.2)
1 rad = 57,3°=0,159 pełnego obrotu (12.3)
Położenie kątowe – kąt jaki tworzy linia odniesienia z pewnym stałym kierunkiem, wybranym za kierunek o zerowym położeniu kątowym
Przemieszczenie kątowe -
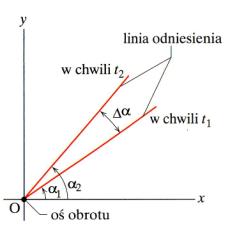
Rys. 12.3.
Linia odniesienia ciała sztywnego z rysunków 12.1 i 12.2 ma w chwili t1
położenie kątowe a1,
a w pewnej późniejszej chwili t2 położenie kątowe a2.
Wielkość Da=a2-a1
jest przemieszczeniem kątowym ciała w czasie Dt=t2-t1. Samo ciało sztywne nie
zostało ty narysowane.
Zapamiętajmy:
Przemieszczenie kątowe jest dodatnie, jeśli obrót zachodzi w kierunku przeciwnym do kierunku wskazówek zegara, a jest ujemne , jeśli zachodzi w kierunku zgodnym z kierunkiem wskazówek zegara.
Związek zmiennych liniowych
z kątowymi
Między kinematycznymi wielkościami kątowymi i liniowymi istanieją proste związki matematyczne. Wyprowadzimy je korzystając ze znanej z geometrii elementarnej zależności między wartością kąta środkowego Da a długością łuku Ds okręgu o promieniu r, na którym ten okrąg jest oparty,
![]() (12.4)
(12.4)
Wychodząc z definicji prędkości kątowej
![]() (12.5)
(12.5)
Po podstawieniu zależności 12.4 do 12.5 otrzymujemy
![]() (12.6)
(12.6)
Analogiczny związek istnieje między wartościami średnimi tych prędkości
![]() (12.7)
(12.7)
oraz pomiędzy przyrostami tych prędkości
![]() (12.8)
(12.8)
Wychodząc następnie z definicji przyspieszenia kątowego
![]() (12.9)
(12.9)
a następnie podstawiając zależność 12.8 otrzymamy
![]() (12.10)
(12.10)
Zależności między wektorami kinematycznych wielkości kątowych i liniowych można wyrazić za pomocą następujących iloczynów wektorowych
![]() (12.11)
(12.11)
![]() (12.12)
(12.12)
![]() (12.13)
(12.13)
Usytuowanie przestrzenne wektorów występujących w ostatnich wzorach pokazano na rysunku 12.4
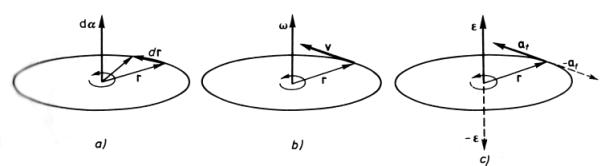
Rys. 12.4. Usytuowanie przestrzenne wektorów kinematycznych wielkości kątowych i liniowych
13. Ruch falowy
Równanie fali sinusoidalnej
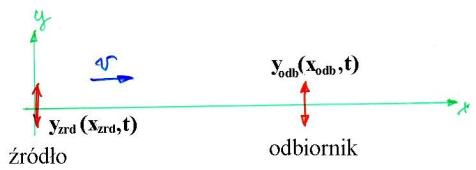
Rys. 13.1. Rozchodzenie się zaburzenia sinusoidalnego
(poprzecznego) wzdłuż osi x z prędkością v.
Drgania punktu źródłowego opisuje równanie
![]()
Dla punktu nazwanego odbiornik
![]()
gdzie
![]()
tak wiec w odbiorniku mamy
![]()
Dla dowolnego x mamy
![]()
V – prędkość rozchodzenia się fali
Y – amplituda drgań
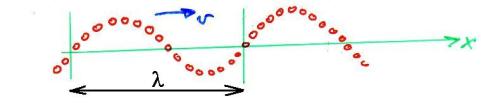
Rys. 13.2. „fotografia”
drgających punktów uczestniczących w ruchu falowym (obserwujemy wszystkie w tym
samym czasie)
Na rysunku zaznaczono długość fali czyli odległość pomiędzy dwoma punktami drgającymi w tej samej fazie – oznaczamy ją l. Ważną wielkością jest też okres (oznaczany przez T) – jest to czas w którym fala przebywa odległość równą długości fali. Okres jest też odwrotnością częstotliwości fali (oznaczaną f).
Równanie fali, liczba falowa
Wychodząc z równania fali
![]()
podstawiając
![]()
![]()
![]()
![]()
wielkość ![]() zwana jest liczbą
falową
zwana jest liczbą
falową
ostatecznie równanie fali sinusoidalnej zapisujemy w postaci
![]()
Równanie to obowiązuje zarówno dla fali poprzecznej jak i podłużnej.
Należy
podkreślić że w ruchu falowym w kierunki propagacji fali (zaburzenia) mamy
transport energii a nie masy.