For a wide class of distributed parameter systems it is impossible or difficult to derive explicit
formulae expressing the performance index as a function of the system parameters. In this case
the proposed approximate methods lead to a numerical algorithm which is a reasonable
compromise between simplicity of calculations, applicability of the standard software and
accuracy of results. The main barrier in getting better accuracy is the ill–conditioning of the
Hankel–Hilbert matrix.
In Matlabimplementation, to overcome this barrier it is recommended to solve (5.3) using the command
"" specialized for solving
linear algebraic equation .
On the basis of two examples presented in Section 5.4 we conclude that the accuracy
may be sometimes insufficient for control engineering applications. To be more precise
the accuracy may turn to be not enough to recover the performance index in the
vicinity of a minimum of the performance index. To avoid such effects the variable
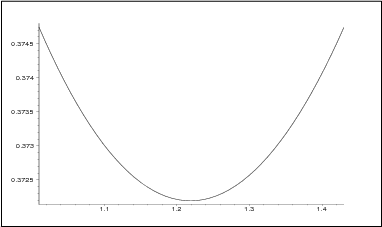
point arithmetics, as offered by e.g. Maple 6, is recommended. Figure 5.4 shows
the result of implementing (5.10) on Maple 6 with Digits:=90; command to get
–dimensional
approximation of the performance index (5.11). The results are decidedly better than those
presented in Figure 5.2.
Figure 5.4:
Plots of the performance index for the system examined in Example 1. Here
a precise approximation was achieved by the variable–point arithmetics from Maple 6