Consider a controlled distortionless
transmission line, i.e. ,
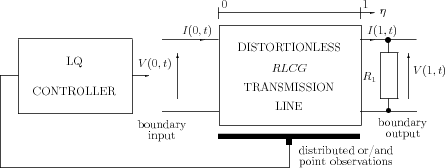
loaded by a resistance
and depicted in Figure 8.1.
Figure 8.1:
The control system under study
The system is governed by the equations
(8.1)
The control is an input voltage and its goal is to minimize the sum of energy of the input and
output signals expressed by the performance index
(8.2)
The d’Alembert solutions of the first two equations take the form (3.8) with
.
Substituting (3.8) into boundary conditions, we get the system of functional equations
(8.3)
where
is the reflection coefficient. Introducing the new variables