|
|
| (2.56) |
where , , , and , with appropriate initial conditions.
The space and the operator given by
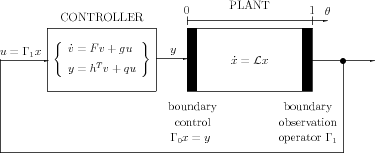
are naturally connected with the system (2.56). The system (2.56) is a particular case of a class of hybrid feedback system depicted in Figure 2.7
with
An eigenvalue problem for takes the form
Premultiplying the first equation by and the second equation by , and adding the resulting equations, we come to "the reduced eigenproblem":
| (2.57) |
The polynomials of the spectral parameter , appearing in the boundary conditions, are easily identified as the numerator and denominator of the transfer function of the finite–dimensional part. Similar equations can be derived for the conventional PID controller.
Mikhaylov [65] and Kesel’man [54], referring the results due to J.Schwartz, have obtained a Riesz–basis criterion for such operators in the case of boundary conditions not containing the spectral parameter. Their criterion reduces to checking the so–called strict regularity of boundary conditions. In what follows we present briefly this theory.
In the Hilbert space equipped in the scalar product we consider a differential operator with coefficients , and the normalized boundary conditions,
| (2.58) |
where , , , .
| (2.59) |
and assume , , for simplicity of notation. The boundary conditions in (2.58) are called regular if
where , are defined by the identity
| (2.60) |
or
with , , defined now by the identity
| (2.61) |
The boundary conditions in (2.58) are strictly regular if they are regular and additionally
| (2.62) |
Theorem 2.9.1 (Schwartz–Mikhaylov–Kesel’man). Let be the operator of the form (2.58) with the strictly regular boundary conditions. Then only the finitely many of eigenvalues are nonsimple, and there exists a system of generalized eigenvectors which forms a Riesz basis in .
Corollary 2.9.1. Consider the differential operator
| (2.63) |
Denote by the determinant of a matrix constructed of the –th and –th columns of the matrix of boundary conditions, . The operator (2.63) has the form (2.58) with and in the following three cases:
By Definition 2.9.1 in the case 1 the boundary conditions in (2.63) are regular or equivalently strictly regular if
| (2.64) |
In the case 2 the boundary conditions are regular if
| (2.65) |
and strictly regular if additionally
| (2.66) |
In the case 3 the boundary condition are regular or equivalently strictly regular if
| (2.67) |
Moreover, (2.65) can be expressed in terms of as
| (2.68) |
while (2.67) can be expressed as
or equivalently in the form
| (2.69) |
The above theory applies to the hybrid feedback systems with a plant describable by an –th order ordinary differential operator with a spatial domain equal to the interval . The control and observation should act at the ends of the interval , i.e., they are of the boundary type. Finally, the feedback controller must be purely proportional (the case of a purely static control without any dynamics).
Exercise 2.9.2. Derive Proposition 2.5.1 from Corollary 2.9.1 proving that the boundary conditions in (2.4) are regular for any and strictly regular iff .
Remark 2.9.1. For the operator
we have: , , , (hence ), , , (hence ). From (2.59) we get , and by (2.61)
This yields , , and . Therefore (2.62) is not satisfied and the boundary conditions are regular but not strictly regular. The spectrum of the operator consists of two series of eigenvalues. The first one is , while the second one tends asymptotically as to the first one. There is no system of eigenvectors which forms a basis because the angle between eigenspaces corresponding to the two series of eigenvalues, tends to as [54], [85]. This example shows that (2.62) is essential for the validity of the assertion of Theorem 2.9.1. Any system of eigenvectors does not generally constitutes a Riesz basis, however, a Riesz basis of subspaces can be constructed from an appropriately chosen sequence of subspaces [77], [5].
Shkalikov [78] gives an extensive discussion of the Riesz–basis problem of a system of eigenvectors or subspaces in the case of a spectral parameter polynomially entering the boundary conditions. Some criteria are established for basisness in various spaces, particularly related to (2.57). The results directly concern the operator (2.57) or its realizations in those spaces. Application of Shkalikov’s theory requires, however, a separate detail presentation [40, 41, 42, 43].
If the series (2.28) admits an explicit summation, then it is possible to obtain a compact formula expressing the performance index in terms of the system parameters. From the example discussed, one may conclude that an exact knowledge of the spectrum simplifies these attempts. In the opposite case, the series (2.28) should be approximated by its truncations, with eigenvalues calculated numerically.
If is the state space, and the assumptions of Theorem 2.4.1 hold, then the information about the general form of a solution to the Lyapunov equation is sufficient to characterize the kernel of this solution by an integral equation. For computational purposes, this equation can be converted, with the aid of the inflation technique, into a matrix Lyapunov equation. Further investigations should be focused on a maximal elimination of the need of exact knowledge of a spectrum.