3.1.1 Example 1: Nuclear reactor temperature control I
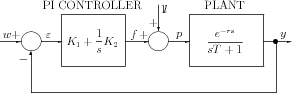
Consider the nuclear reactor temperature control system depicted in Figure 3.1.
Figure 3.1:
The nuclear reactor temperature control system
The dynamics equations of the system described in [36] are
(3.1)
where ,
are parameters,
denotes the Heaviside
step function and ,
are
fixed positive constants. If we assume that the system is asymptotically stable and until
the moment of the appearance of a disturbance it remains in equilibrium, then for