|
|
For a time–delay system governed by the equations
| (6.31) |
we wish to construct a stabilizing controller, minimizing the performance index
| (6.32) |
The investigated system represents a class of degenerated time–delay systems, which are reducible to a finite–dimensional system without retardation. This reduction can be achieved by introducing the new state variables
| (6.33) |
As a result the equations (6.31) take the form
| (6.34) |
| (6.35) |
provided that the restriction of to an interval is the solution of the nonhomogeneous differential equation
| (6.36) |
The solution of (6.36) is
and thus
| (6.37) |
The first integral in (6.35) does not depend on control and thus the synthesis of a stabilizing controller reduces to the analysis of the system (6.1) in a Hilbert space with
The pair is controllable, hence stabilizable. is observable, hence detectable. The construction of stabilizing controller problem is thus well–posed.
An approximate solution can be found with the aid of an iterative process (6.9), which in agrees with the Newton–Kleinman method for solving the matrix Riccati equation (6.15) – see [29]. Applying the Matlab/Control Toolbox one obtains
and a characteristic polynomial of the closed–loop optimal system
having the roots .
The exact solution will be found by applying the Callier–Winkin lemma. Since we can take in (6.16). Now ( with ) and we have
Consequently, (6.24) is a polynomial spectral factorization problem. The factor satisfying (6.25) has the form
| (6.38) |
The optimal stabilizing controller can be determined from (6.23)
which agrees with numerical calculations. The optimal controller produces the steering
| (6.39) |
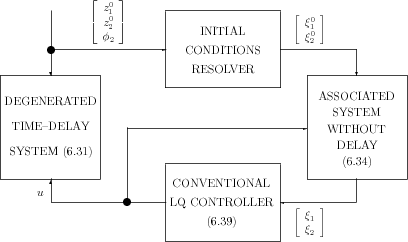
The diagram explaining a synthesis of the optimal control law (6.39) is depicted in Figure 6.2. The initial conditions resolver recovers from , using (6.37).
Interchanging by , in the first equation of (6.31) which can be done since and this equation holds for , yields
Multiplying both sides by and integrating the right–hand side with respect to we get
An equivalent representation of control can be derived by taking the above result into account in (6.39)
| (6.40) |
The representation (6.40) removes any doubts concerning the realizability of the control expressed in a form (6.39) where the current values of are determined by the future values of .
In a Hilbert space , (6.31) can be written as an abstract equation (6.1) with
| (6.41) |
The performance index is then described in a form appearing in (6.2). It is well–known, see [30, p. 139], that a necessary and sufficient condition for the semigroup generated on by
| (6.42) |
to be exponentially stable EXS is that all zeros of the characteristic quasipolynomial which is an entire function should have negative real parts. In our example,
and thus . Hence the semigroup generated by , defined in (6.41) is EXS. The pair is clearly stabilizable and detectable. One may apply also the general results in [83]. The problem of optimal stabilizing controller synthesis has a solution. To find it, we put in (6.16) getting . From the equation , one obtains
Now, the solution of the factorization problem (6.24) is again expressed in the form (6.38). The identity (6.23) uniquely represents an optimal controller, provided that is approximately controllable. We have
| (6.43) |
| (6.44) |
and approximate controllability easily follows from this criterion due to Triggiani and Manitius – see [75, p. 133].
In virtue of the Riesz representation theorem we may seek the optimal controller in a vector form
| (6.45) |
Hence, the identity (6.23) takes the form
In fact this is an identity for entire functions,
| (6.46) |
The first integral in (6.46) is an entire function of having the growth exponent distinct from the exponents of other terms (accordingly to the Paley–Wiener Theorem its support is located outside the interval ). Thus, we should assume . Another justification is also possible. Namely, by (6.21) and the Paley–Wiener Theorem we have
The restriction of the system to its invariant subspace arises by zeroing the first function component. As , this component will not participate in the optimal control law.
Now, assume for a while that . Integrating–by–parts and comparing coefficients of the terms with the same growth exponents in (6.46), we obtain
| (6.47) |
and the two–point boundary value problem
| (6.48) |
Problem (6.48) has a unique solution
| (6.49) |
Taking (6.47), (6.49) and (6.45) into account in the formula for the optimal control we get again (6.40). The uniqueness of the optimal controller justifies the fact that was assumed to be absolutely continuous.