|
|
The least–square identification of the system parameters of the model (1.8) can be formulated as the problem of finding a quadruple , which minimizes the performance index
| (7.29) |
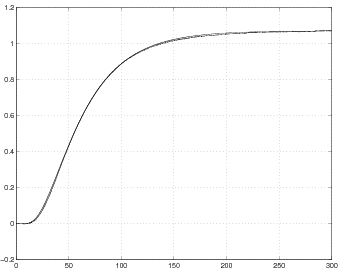
where stands for the theoretical value of the step response at time , , evaluated by means of formulae (7.26) (7.28), and , is a practical value of the step response at time , , obtained from measurements; denotes the time discretization step, and is the final horizon of observation expressed by the total number of trials. In experiments we have assumed , . The unknown coefficient is determined from the requirement that the steady–state values of and coincide. To be more precise, we have
Assuming that the horizon of observation is sufficiently large we may take
In numerical calculations we used truncation of series (7.26) to terms, which seems to be a reasonable compromise between the time of calculations and the accuracy. The optimal values of , , and were determined by means of the procedure fmins from the Matlab/Optimization Toolbox package. Since the performance index is not unimodal the procedure fmins of the optimization without constraints was used several times and with various starting points. Final results are presented in Table 7.1.
|
The experimental and theoretical step responses are depicted in Figure 7.1.