]>
3.1.3 Example 3: Automatic control system with PID controller
3.1.3 Example 3: Automatic control system with PID controller
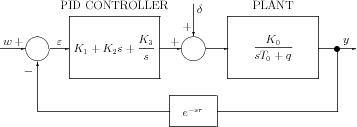
The dynamics of the system depicted in Figure 3.3
is governed by the equations
where denotes the Dirac
pseudofunction and ,
,
,
,
,
and
are constants
(usually
or ).
If we assume that the system is asymptotically stable and until the
appearance of the disturbance it remains in the equilibrium then for
Hence denoting
and introducing the system variables
we obtain the system of equations
|
| (3.14) |
The system (3.14) has the form (3.5) with
The problem is to express explicitly the integral
|
| (3.15) |
by the parameters ,
,
,
.