Taking into account the nature of the initial conditions we conclude that
(3.38)
Hence, to find the matrix
we need to solve the vector differential equation
(3.39)
with initial conditions
(3.40)
which follow from (3.25) and (3.27). From (3.39) and (3.40) we obtain
,
, and
by (3.27): ,
. Consequently
and
therefore the system (3.39) reduces to the form
(3.41)
with initial conditions
(3.42)
The characteristic polynomial of the system (3.41) is biquadratic
where
Hence the fundamental matrix of (3.41) takes a form
where
stands for the matrix of the system (3.41), and
The unknown elements ,
can be
determined from the equality
(3.43)
arising from (3.27). After tedious but elementary calculations, we get from (3.43)
(3.44)
where:
Solving (3.44) with respect to
and substituting the result into (3.38) we find the desired expression for the performance index
in
terms of the system parameters.
In what follows the case of the PD controller will be investigated. In this case
and by (3.14) we have
. The characteristic
quasipolynomial (3.37) reads as
where the expression in the square brackets is the characteristic quasipolynomial
of the remaining part of the system (3.14). It is not difficult to establish that if
then the domain of stability in the space of parameters
is the bounded part
of the semistrip ,
cut by
the arc
where denotes the smallest
positive solution of the equation .
Moreover,
and the system (3.43) reduces to the first equation only. Finally,
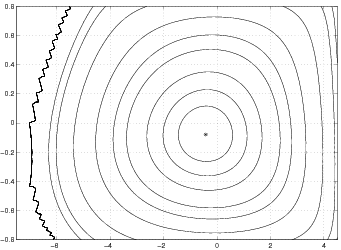
The results of minimization of the performance index (3.38) for
,
are presented at Figure
3.5. The minimal value of
is and it is
achieved at ,
.
Figure 3.5:
The level curves of the performance index
as a function of
and
Exercise 3.3.1. For the time–delay system of the neutral type
calculate the integral performance criterion
in the two following cases:
1
,
2
.
In the first case we have and
therefore by direct calculations .
In the second case
and using the method of steps we obtain
Hence
The above results can be confirmed by the method presented in the previous section. We
identify parameters in (3.5) and (3.16):
The polynomial (3.29) has two roots .
Thus taking we
find from (3.30): ,
. The unique
solution of (3.24) is .
Hence, the system (3.33) takes the form
Its solution is ,
. From (3.32) and
(3.26) we find: ,
for
.
Confirm the results using Remark 3.3.1. Now
where
is given by (3.21). Substituting the initial data we get the same values of
as by
direct calculations.
An advantage of the general attempt to evaluating
is that the value of the performance index is calculated for a wide variety of initial
conditions, while the direct calculations are carried out separately for particular initial data.