|
|
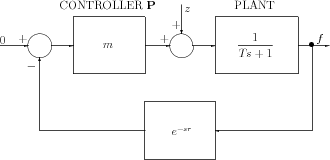
Consider the control system containing a time delay in the feedback loop, depicted in Figure 5.1. The disturbance has a form of the Dirac –pseudofunction.
We wish to solve the parametric optimization problem of finding minimum of the function
where the function is given by its Laplace transform
and is the stability region in the space of the proportional controller gain ,
Here is the smallest positive solution of the equation
The explicit exact expression for the performance index as a function of is given in [32],
| (5.11) |
where .
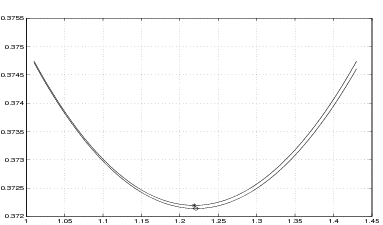
For and the exact values of the performance index calculated from (5.11) are compared in Figures 5.2 with the results derived by applying the approximate method presented in Sections 5.2 and 5.3. The lower curve of Figure 5.2 has been obtained by plotting versus . This was achieved by implementing formula (5.4), with , and given by (5.6) and (5.7), on Matlab 6. The ill–conditioning was observed for large , however –dimensional approximation ensures satisfactory results. The optimal value obtained by the approximation method is while by the exact value is . The approximate value of optimal is while the exact one is . The relative error of finding the optimal value of is less than .