
Ruch przyspieszony po okręgu
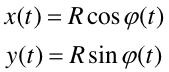
Współrzędne x, y punktu poruszającego się po okręgu można wyrazić za pomocą promienia R (o stałej wartości) oraz kąta φ (rysunek poniżej).
|
(1) |
Przy czym związek między drogą liniową s, a drogą kątową
φ
![]() , jest dany z miary łukowej kąta
φ = s/R.
, jest dany z miary łukowej kąta
φ = s/R.
Różniczkując równania (1), możemy obliczyć zgodnie ze wzorami (3.1), składowe prędkości
|
(2) |
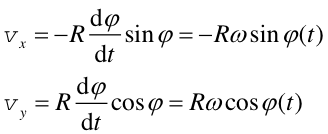
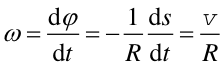
gdzie tempo zmian drogi kątowej dφ/dt
oznaczono jako prędkość kątową
![]() (analogicznie do prędkości liniowej v)
(analogicznie do prędkości liniowej v)
|
(3) |
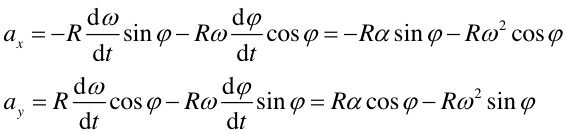
Różniczkując z kolei równania (2) otrzymamy zgodnie ze wzorami (3.1) składowe przyspieszenia
|
(4) |
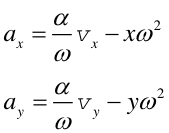
lub
|
(5) |
gdzie wprowadzono przyspieszenie kątowe
α ![]() wyrażające tempo zmian prędkości kątowej dω
/dt
wyrażające tempo zmian prędkości kątowej dω
/dt
|
(6) |

Na podstawie powyższych zależności możemy obliczyć wektor całkowitego przyspieszenia
|
(7) |
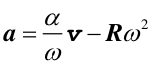
Wektor przyspieszenia całkowitego a jest sumą dwóch wektorów: przyspieszenia stycznego as (równoległego do wektora prędkości v)

i przyspieszenia normalnego an
(przeciwnego do wektora R czyli skierowanego do środka okręgu)
Wektory prędkości liniowej i kątowej oraz wektory przyspieszeń stycznego, normalnego i kątowego, w ruchu przyspieszonym po okręgu, są pokazane na rysunku poniżej.
Wektory prędkości i przyspieszeń w ruchu przyspieszonym po okręgu