Formal methods and robotics
The KBP (Knowledge-Behavior-Platform) architecture is proposed with the aim of integrating the low level control systems (Platform), and artificial intelligence (Knowledge) by interfacing these two layers through explicitly plugging them into the reactive planning component (Behavior). For the implementation language of the behavior model, the CCL notation was chosen.
A Concurrent Communicating Lists (CCL) is a kind of algebraic-like notation, which facilitates executable modeling of computer control systems. CCL is well integrated with Clojure – a modern concurrent dialect of the Lisp language. Thus every CCL model can be easily extend to the fully functional Clojure/Java application.
Papers:
2013
Kułakowski, K.; Szmuc, T.
Outline of CCL notation syntax Technical Report
AGH University of Science and Technology 2013.
@techreport{kulakowski2013oocn,
title = {Outline of CCL notation syntax},
author = {K. Kułakowski and T. Szmuc},
url = {http://winntbg.bg.agh.edu.pl/csl/dacstr-1-2013.pdf},
year = {2013},
date = {2013-01-01},
institution = {AGH University of Science and Technology},
keywords = {},
pubstate = {published},
tppubtype = {techreport}
}
2012
Kułakowski, K.; Szmuc, T.
Modeling Robot Behavior with CCL Book Section
In: Noda, Itsuki; Ando, Noriaki; Brugali, Davide; Kuffner, JamesJ. (Ed.): Simulation, Modeling, and Programming for Autonomous Robots, vol. 7628, pp. 40-51, Springer Berlin Heidelberg, 2012, ISBN: 978-3-642-34326-1.
@incollection{Kulakowski2012mrbw,
title = {Modeling Robot Behavior with CCL},
author = {K. Kułakowski and T. Szmuc},
editor = {Itsuki Noda and Noriaki Ando and Davide Brugali and JamesJ. Kuffner},
url = {http://dx.doi.org/10.1007/978-3-642-34327-8_7},
doi = {10.1007/978-3-642-34327-8_7},
isbn = {978-3-642-34326-1},
year = {2012},
date = {2012-01-01},
booktitle = {Simulation, Modeling, and Programming for Autonomous Robots},
volume = {7628},
pages = {40-51},
publisher = {Springer Berlin Heidelberg},
series = {Lecture Notes in Computer Science},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}
Kułakowski, K.
Concurrent systems modeling with CCL Journal Article
In: Automatyka, 2012.
@article{Kulakowski2012csmw,
title = {Concurrent systems modeling with CCL},
author = {K. Kułakowski},
url = {http://journals.bg.agh.edu.pl/AUTOMAT/2012.16.2/automat.2012.16.2.115.pdf},
year = {2012},
date = {2012-01-01},
journal = {Automatyka},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Kułakowski, K.
CCL Sim, the simulation environment for concurrent systems Proceedings Article
In: proceedings of Dependability and Complex Systems DepCoS, 2012.
@inproceedings{Kulakowski2012CCLS,
title = {CCL Sim, the simulation environment for concurrent systems},
author = {K. Kułakowski},
year = {2012},
date = {2012-01-01},
booktitle = {proceedings of Dependability and Complex Systems DepCoS},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Concurrency
The concurrency research focused on selected concurrency algorithms such as fast autonomous robot path finding, bisimulation. They also included concurrent data structures.
Papers:
2015
Kułakowski, K.
On the Properties of the Priority Deriving Procedure in the Pairwise Comparisons Method Journal Article
In: Fundamenta Informaticae, vol. 139, no. 4, pp. 403 - 419, 2015.
@article{Kulakowski2015otpo,
title = {On the Properties of the Priority Deriving Procedure in the Pairwise Comparisons Method},
author = {K. Kułakowski},
doi = {10.3233/FI-2015-1240},
year = {2015},
date = {2015-07-01},
journal = {Fundamenta Informaticae},
volume = {139},
number = {4},
pages = {403 - 419},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2014
Koczkodaj, W. W.; Kułakowski, K.; Ligęza, A.
On the quality evaluation of scientific entities in Poland supported by consistency-driven pairwise comparisons method Journal Article
In: Scientometrics, vol. 99, no. 3, pp. 911-926, 2014, ISSN: 0138-9130.
@article{Koczkodaj2014otqe,
title = {On the quality evaluation of scientific entities in Poland supported by consistency-driven pairwise comparisons method},
author = {W. W. Koczkodaj and K. Kułakowski and A. Ligęza},
url = {http://dx.doi.org/10.1007/s11192-014-1258-y},
doi = {10.1007/s11192-014-1258-y},
issn = {0138-9130},
year = {2014},
date = {2014-01-01},
journal = {Scientometrics},
volume = {99},
number = {3},
pages = {911-926},
publisher = {Springer Netherlands},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2013
Kułakowski, K.
Notes on discrepancy in the pairwise comparisons method Journal Article
In: CoRR (Submitted to EJOR), vol. abs/1312.2986, 2013.
@article{Kulakowski2013nodi,
title = {Notes on discrepancy in the pairwise comparisons method},
author = {K. Kułakowski},
year = {2013},
date = {2013-01-01},
journal = {CoRR (Submitted to EJOR)},
volume = {abs/1312.2986},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2012
Kułakowski, K.; Szmuc, T.
Modeling Robot Behavior with CCL Book Section
In: Noda, Itsuki; Ando, Noriaki; Brugali, Davide; Kuffner, JamesJ. (Ed.): Simulation, Modeling, and Programming for Autonomous Robots, vol. 7628, pp. 40-51, Springer Berlin Heidelberg, 2012, ISBN: 978-3-642-34326-1.
@incollection{Kulakowski2012mrbw,
title = {Modeling Robot Behavior with CCL},
author = {K. Kułakowski and T. Szmuc},
editor = {Itsuki Noda and Noriaki Ando and Davide Brugali and JamesJ. Kuffner},
url = {http://dx.doi.org/10.1007/978-3-642-34327-8_7},
doi = {10.1007/978-3-642-34327-8_7},
isbn = {978-3-642-34326-1},
year = {2012},
date = {2012-01-01},
booktitle = {Simulation, Modeling, and Programming for Autonomous Robots},
volume = {7628},
pages = {40-51},
publisher = {Springer Berlin Heidelberg},
series = {Lecture Notes in Computer Science},
keywords = {},
pubstate = {published},
tppubtype = {incollection}
}
2010
Rzucidło, J.; Kułakowski, K.
Explorer – the robust search robot Book Chapter
In: Wrocław University of Technology. — Wrocław : Oficyna Wydawnicza Politechniki Wrocławskiej, 2010.
@inbook{Kulakowski2010etrs,
title = {Explorer – the robust search robot},
author = {J. Rzucidło and K. Kułakowski},
year = {2010},
date = {2010-01-01},
journal = {Information systems architecture and technology : system analysis approach to the design, control and decision support},
publisher = {Wrocław University of Technology. — Wrocław : Oficyna Wydawnicza Politechniki Wrocławskiej},
keywords = {},
pubstate = {published},
tppubtype = {inbook}
}
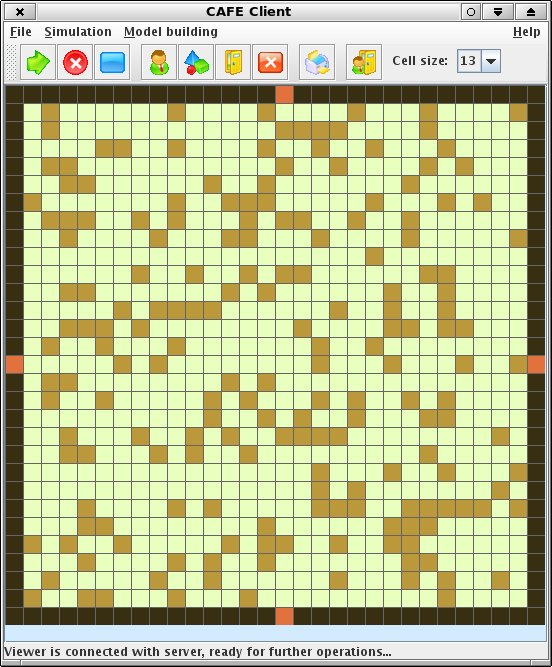
Pedestrian dynamics and simulation
Cafe – which means: Cellular Automata Framework Environment. The aim of this project is to create a Java based CA modeling tool which allows to create and simulate various kinds of asynchronous, nonhomogenous cellular automata. The automata built this way will be used to simulation of pedestrians behaviors (MNiSW grant: N N516 228735), and to modeling robots behavior. In the robotic approach CA is treated as another kind of knowledge used by so-called Intelligent Control System. Screen of the Cafe’s early version can be viewed below.
Papers:
2010
Kułakowski, K.; Wąs, J.; Topa, P.
Simulation environment for modeling pedestrian dynamics Book Chapter
In: Intelligent Information Systems : new approaches, Publishing House of University of Podlasie, 2010.
@inbook{Kulakowski2010sefm,
title = {Simulation environment for modeling pedestrian dynamics},
author = {K. Kułakowski and J. Wąs and P. Topa},
year = {2010},
date = {2010-01-01},
booktitle = {Intelligent Information Systems : new approaches},
publisher = {Publishing House of University of Podlasie},
keywords = {},
pubstate = {published},
tppubtype = {inbook}
}
Wąs, J.; Kułakowski, K.
Agent-Based Approach in Evacuation Modeling Proceedings Article
In: Jędrzejowicz, Piotr; Nguyen, Ngoc Thanh; Howlet, Robert J.; Jain, Lakhmi C. (Ed.): Agent and Multi-Agent Systems: Technologies and Applications, pp. 325–330, Springer Berlin Heidelberg, Berlin, Heidelberg, 2010, ISBN: 978-3-642-13480-7.
@inproceedings{Was2010aaie,
title = {Agent-Based Approach in Evacuation Modeling},
author = {J. Wąs and K. Kułakowski},
editor = {Piotr Jędrzejowicz and Ngoc Thanh Nguyen and Robert J. Howlet and Lakhmi C. Jain},
isbn = {978-3-642-13480-7},
year = {2010},
date = {2010-01-01},
booktitle = {Agent and Multi-Agent Systems: Technologies and Applications},
pages = {325–330},
publisher = {Springer Berlin Heidelberg},
address = {Berlin, Heidelberg},
abstract = {The article presents an agent-based approach to modeling of pedestrian evacuation. It includes some theoretical aspect of using the agents techniques as well as case study of evacuation tests realized by the authors. Results from real data gained from experiments are compared with data from designed simulations. The use of agent-based methods gives promising perspective in pedestrian evacuation modeling.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
The article presents an agent-based approach to modeling of pedestrian evacuation. It includes some theoretical aspect of using the agents techniques as well as case study of evacuation tests realized by the authors. Results from real data gained from experiments are compared with data from designed simulations. The use of agent-based methods gives promising perspective in pedestrian evacuation modeling.
2009
Wąs, J.; Kułakowski, K.
Multi-agent Systems in Pedestrian Dynamics Modeling Proceedings Article
In: Nguyen, Ngoc Thanh; Kowalczyk, Ryszard; Chen, Shyi-Ming (Ed.): Computational Collective Intelligence. Semantic Web, Social Networks and Multiagent Systems, pp. 294–300, Springer Berlin Heidelberg, Berlin, Heidelberg, 2009, ISBN: 978-3-642-04441-0.
@inproceedings{Was2009msip,
title = {Multi-agent Systems in Pedestrian Dynamics Modeling},
author = {J. Wąs and K. Kułakowski},
editor = {Ngoc Thanh Nguyen and Ryszard Kowalczyk and Shyi-Ming Chen},
isbn = {978-3-642-04441-0},
year = {2009},
date = {2009-01-01},
booktitle = {Computational Collective Intelligence. Semantic Web, Social Networks and Multiagent Systems},
pages = {294–300},
publisher = {Springer Berlin Heidelberg},
address = {Berlin, Heidelberg},
abstract = {The article presents the use of Multi-agent system (MAS) in pedestrian dynamics modeling. Current trends in pedestrian dynamics are presented with particular focus on a short review of various agent-based models of pedestrian dynamics. The models are briefly discussed and compared.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
The article presents the use of Multi-agent system (MAS) in pedestrian dynamics modeling. Current trends in pedestrian dynamics are presented with particular focus on a short review of various agent-based models of pedestrian dynamics. The models are briefly discussed and compared.
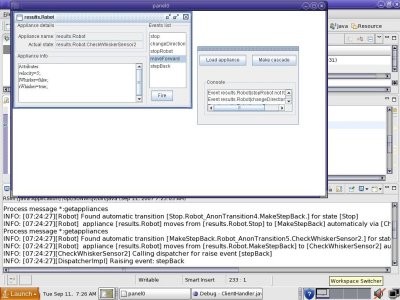
Software engineering and real time systems
Proposed approach to executable modeling of ractive systems consist of two elements: UML editor and Reactive Appliance Toolkit. There is no limitation to one specific kind of UML editor. Every editor could be used if satisfy following requirements: at least metamodel 1.4, XMI support, stereotypes and profiles, class diagram, statechart diagram, activity diagram.
In order to use Reactive Appliance Toolkit standard Java 1 and some implementation of RealTime Java (e.g. Jamaica VM 2) should be instaled. Reactive Appliance Toolkit consist of three components:
- API library
- Code generator
- Management console
A console for the robot control case study is shown below:
Papers:
2008
Kulakowski, K.; Kostrzewa, M.
Rapid prototyping of real-time reactive systems Proceedings Article
In: Proceedings of International Conference on Signals and Electronic Systems, 2008. ICSES '08., pp. 381-384, 2008.
@inproceedings{Kulakowski2008rpor,
title = {Rapid prototyping of real-time reactive systems},
author = {K. Kulakowski and M. Kostrzewa},
doi = {10.1109/ICSES.2008.4673443},
year = {2008},
date = {2008-09-01},
booktitle = {Proceedings of International Conference on Signals and Electronic Systems, 2008. ICSES '08.},
pages = {381-384},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Kułakowski, K.; Kostrzewa, M.
Modelowanie systemów czasu rzeczywistego w UML Journal Article
In: Automatyka, 2008.
@article{Kulakowski2008mscr,
title = {Modelowanie systemów czasu rzeczywistego w UML},
author = {K. Kułakowski and M. Kostrzewa},
year = {2008},
date = {2008-01-01},
urldate = {2008-01-01},
journal = {Automatyka},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2007
Kułakowski, K.; Kostrzewa, M.
Modelowanie Systemów Czasu Rzeczywistego w UML Proceedings Article
In: Seminarium wyjazdowe KA w Lublinie, 2007.
@inproceedings{Kulakowski2007mscr,
title = {Modelowanie Systemów Czasu Rzeczywistego w UML},
author = {K. Kułakowski and M. Kostrzewa},
year = {2007},
date = {2007-01-01},
urldate = {2007-01-01},
booktitle = {Seminarium wyjazdowe KA w Lublinie},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
2006
Kułakowski, K.; Kostrzewa, M.
Wspomaganie tworzenia oprogramowania systemów reaktywnych w Real Time Java Proceedings Article
In: Systemy informatyczne z ograniczeniami czasowymi, WKŁ Wydawnictwa Komunikacji i Łączności, 2006.
@inproceedings{Kulakowski2006wtos,
title = {Wspomaganie tworzenia oprogramowania systemów reaktywnych w Real Time Java},
author = {K. Kułakowski and M. Kostrzewa},
year = {2006},
date = {2006-01-01},
booktitle = {Systemy informatyczne z ograniczeniami czasowymi},
publisher = {WKŁ Wydawnictwa Komunikacji i Łączności},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Kostrzewa, M.; Kułakowski, K.
A practical approach to the modelling, visualising and executing of reactive systems Proceedings Article
In: MIXed DESign of integrated circuits and systems, pp. 705–710, 2006.
@inproceedings{Kostrzewa2006apat,
title = {A practical approach to the modelling, visualising and executing of reactive systems},
author = {M. Kostrzewa and K. Kułakowski},
year = {2006},
date = {2006-01-01},
booktitle = {MIXed DESign of integrated circuits and systems},
pages = {705–710},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}