Aktualności: |
Zajęcia odbywają się według harmonogramu z Wirtualnego Dziekanatu
Zasady organizacji zajęć - PDF
W dniu 4.12.2019 (środa) odbędzie się wycieczka do fabryki Fiata w Tychach - zgłoszenia do końca października mailowo do prowadzącego
Ocena końcowa z przedmiotu (semestr zimowy 2019/2020)
Ocena końcowa (bez egzaminu) = 0,5 * ocena z laboratorium + 0,5 * ocena z projektu
Laboratoria standardowe:
- Grupy jednoosobowe, obecność na zajęciach obowiązkowa.
- Link do defaultowego projektu strategii - C++, Visual Studio 2008.
- Wykład dotyczący symulatora Robot Soccer v.1.5.
- Strona www federacji Fira zawierajca instalator symulatora
- wersja portable symulatora - do momentu udostępnienia symulatora na stronie federacji Fira
- Na każdych zajeciach student otrzymuję ocenę z aktywności na podstawie stopnia i jakości realizacji zadania z laboratorium.
- Po każdych zajeciach (w ciągu 7 dni od daty zajęć) należy przesłać mailowo:
- sprawozdanie z laboratorium w formacie .pdf - treść ustala prowadzący podczas zajęć (częściowo opisane jest to poniżej). Każde ze sprawozdań jest oceniane.
- kod źródłowy strategii (plik/pliki .cpp i ewentualnie .h)
- Ocena końcowa z laboratorium jest wyliczna ze wzoru : (0,5 * średnia arytmetyczna ocen z aktywności) + (0,5 * średnia arytmetyczna ocen ze sprawozdań) +- bonus za miejsce w turnieju końcowym - (0,2 * każde spóźnienie)
Tematy laboratoriów
- Laboratorium nr 1
- Instalacja i konfiguracja środowiska i symulatora.
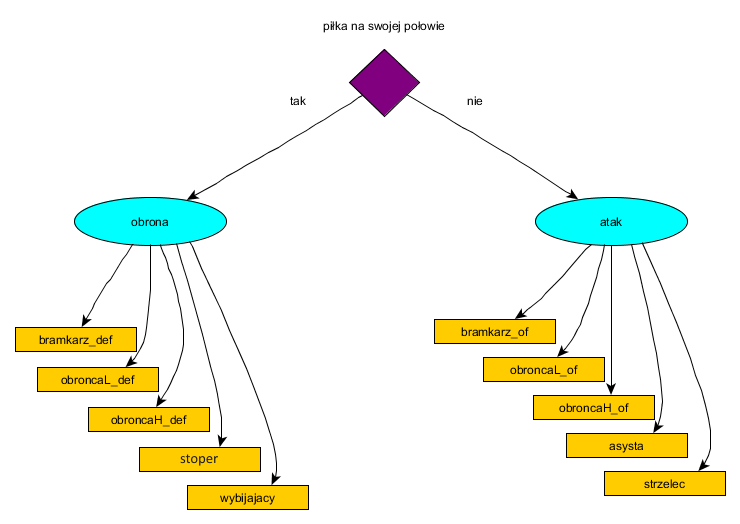
- Zapoznanie z symulatorem i architekturą tworzenia strategii. Przykładowa uproszczona strategia podstawowa, oraz jej graf.
- Implementacja strategii podstawowej
- Projekt własnej strategii
- Pierwszy etap implementacji własnej strategii
Sprawozadanie powinno zawierać:
- Projekt własnej strategii składający się z:
- Grafu strategii (1 strona A4)
- Opis szczegółów wszystkich 3 warstw (min. 2 strony A4):
- warstwa decyzyjna - na podstawie jakich informacji wybierane są poszczególne strategie chwilowe. Uzasadnienie koncepcji.
- warstwa strategii chwilowych - opis wszystkich strategii chwilowych (min. 3). Główna koncepcja danej strategii, wypisanie ról występujących w danej strategii, algorytm wyboru robota dla danej roli, priorytety przydziału ról.
- metody podstawowych - wypisanie wszystkich ról podstawowych używanych w strategii (minimum 7). Opis algorytmu realizacji danej roli (około 4 zdań na metodę, w zależności od stopnia skomplikowania)
- opis metod dodatkowych lub pomocniczych
- Informacje o metodach, które zostały zaimplementowane wraz z ich opisem: 1-3 zdania opisu + kod
Laboratorium nr 2
- Kontynuacja implementacji własnej strategii.
- Wstępna integracja projektu ze strategią
- Mecz testowy - wnioski, poprawki.
- Dokończenie implementacji własnej strategii
Sprawozdanie powinno zawierać:
- Opis rozwiązania adaptującego strategię do różnych drużyn (niebieska,żółta)
- Opis meczu sparingowego, z uwzględnieniem wad i zalet strategii.
- Szczegółowy opis aktualnej wersji strategii oraz opis elementów (metod, funkcji pomocniczych), które zostały zaimplementowane. (wraz z kodem)
Turniej finałowy
- Prezentacja dokumentacji, kodu i działania strategii (laboratorium + projekt)
- Turniej finałowy
Sprawozdanie powinno zawierać:
- Pełną dokumentację laboratorium (tak jak w poprzednim lab) uzupełnioną o ewentualne dodatkowe zaimplementowane elementy.
- Dodatkowo wnioski z turnieju: silne i słabe strony strategii, ewentualne plany rozwoju strategii
Wszelkie niejasności i pytania - na maila.
Projekt stanardowy
- grupy jednoosobowe, obowiązkowa obecność na zajęciach.
- Tematy projektów
- Poprawa funkcji dojazdu do punktu (position) - max. 5.0
- Dojazd do punktu pod kątem - max. 5.0
- Strzał na bramkę przy ruchomej piłce - max. 5.0
- Zaawansowana obrona - max. 4.0
- Zaawansowany atak - max. 4.0
- Zaawansowany bramkarz - max. 3.5
- Projekt wraz z dokumentacją (kod, idea, grafy, rysunki, wzory matematyczne, opis) oddawane na ostatnich zajęciach (przed turniejem finałowym)
- Konieczność włączenia zrealizowanego projektu do strategii tworzonej na laboratorium
Niestandardowy tryb zaliczania przedmiotu (laboratorium oraz projektu):
- projekt indywidualny
- referatu wraz z prezentacją
Szczegóły ustalane bezpośrednio z prowadzącym.
Zaliczenie projektu/referatu na podstawie prezentacji w trakcie wykładu.
Prezentacja ok 20min. (7 osób na 1 wykład).
Konieczność mailowego przesłania specyfikacji projektu/referatu do końca października. Schemat, zakres tematyczny (ok. 2 strony A4).
Indywidualne projekty - przykładowy zakres tematyczny: mikrokontrolery (Arduino, RaspberryPi) wraz z rozszerzeniami, interfejs fal mózgowych, roboty mobilne, kontrolery ruchu - Kinect, Leap3d, itp.;
Przykładowe tematy projektów :
- Smart home - sterowanie światłem
- Monitor przepływu gazu w piecu gazowym
- Sterowanie akcesoriami akwarium
- Sejf autoryzowany zbliżeniowo
- Robot mini-sumo
- Czujnik cofania - Miśkowiec Marcin (schemat ok)
- Algorytmy rozpoznawania twarzy
- Stacja pogodowa - Sywała Maciej (brak schematu)
- Stacja pogodowa (zew/wew) + monitor stanu okien - Cedzidło Dominik (schemat ok)
- Mobilna stacja pogodowa z monitorem zapylenia - Machulec Dawid (schematu w wersji minimum)
- System monitoringu
- Lokalizator GPS w oparciu o platformę RPi4 - Kudzia Maciej (schemat w wersji minimum)
- Sterowanie ogrzewaniem
- Sterowanie procesem wytwarzania wina - Laszczak Wojciech (schemat ok)
- Technologie zbliżeniowe - Witas Jakub (schemat ok)
- Autoryzacja w oparciu o RFID - Jakub Miśkowiec (schemat ok)
Tematy referatów:
- Projekty NASA w dziedzinie robotyki i eksploracji przestrzeni kosmicznej - Półchłopek Daniel (schemat ok)
- Środowiska symulacji robotów - Rusiniak Marek (brak schematu)
- Technologia blockchain - kryptowaluty i nie tylko - Wasilonek Kamil (schemat ok)
- Pojazdy elektryczne, hybrydowe - aktualny stan rynku i tendencje rozwoju - Szysiak Robert (schemat ok)
- Roboty humanoidalne - historia i aktualna sytuacja w robotyce - Świąder Mateusz (schemat w wersji minimum)
- Metody przemieszczania robotów dwunożnych
- Zagadnienie zasilania w robotyce ze szczególnym uwzględnieniem robotów mobilnych i autonomicznych
- Pojazdy autonomiczne - algorytmy zarządzania, sterowania, AI - Rataj Mateusz (schemat ok)
- Nowoczesne materiały i technologie w robotyce - Raszka Adrian (schemat w wersji minimum)
- Nowoczesne rozwiązania z zakresu robotyki w życiu codziennym człowieka - Krzyżowski Marcin (schemat w wersji minimum).
- Roboty i manipulatory przemysłowe - stan wiedzy, warunki eksploatacji, modele matematyczne, sterowanie, rodzaje napędów, dynamika, efektory.
- Wielowymiarowe układy sterowania z filtrem Kalmana.
- Modelowanie i mapowanie otoczenia w robotyce.
- Systemy mechatroniczne - architektura, czujniki, napędy, efektory - Rówiński Michał (schemat w wersji minimum)
- Systemy wirtualnej rzeczywistości - Podulka Jędrzej (schemat ok)
- Obiekty zdalnie sterowane - technologia RC - Gamrat Szymon (schemat słaby, spóźniony)
- Możliwości platformy Android Things - Bogusiewicz Artur (schemat ok)
- Analiza działania i przydatności kontrolerów ruchu - na przykładzie sensora Microsoft Kinect - Lesiak Gabriela (schemat ok)
- Manipulatory przemysłowe na przykładzie Mitsubishi Electric Europe B.V. - Gmurkowski Tomasz(schemat ok)
Harmonogram prezentacji projektów i referatów
(max. 7 osób na 1 wykład)
(rezerwacji terminu można dokonać po przesłaniu szkicu referatu/prezentacji i zaakceptowaniu go przez prowadzącego)
- Wykład nr 4 - 15.12.2019, g.14:00-16:15
- Autoryzacja w oparciu o technologię RFID - Miśkowiec Jakub
- Czujnik cofania - Miśkowiec Marcin
- Manipulatory Przemysłowe - Gmurkowski Tomasz
- Roboty humanoidalne - Świąder Mateusz
- Nowoczesne materiały i technologie w robotce - Raszka Adrian
- Kinect - Lesiak Gabriela
- RC - Gamrat Szymon
- Wykład nr 5 - 15.12.2019, g.16:30-18:45
- Mobilna stacja pogodowa z monitorem zapylenia - Machulec Dawid
- Pojazdy elektryczne i hybrydowe - Norbert Szysiak
- Systemy wirtualnej rzeczywistości - Podulka Jędrzej
- Pojazdy autonomiczne - Rataj Mateusz
- Lokalizator GPS - Kudzia maciej
- Blockchain - Wasilonek Kamil
- Technologie zbliżeniowe - Witas Jakub
- Wykład nr 6 - 26.01.2020, g.8:00-10:15
- Platforma mobilna - Sebastian Wiatrowicz
- Symulatory robotów - Rusiniak Marek
- Systemy mechatroniczne - Rówiński Michał
- Stacja pogodowa - Cedzidło Dominik
- Projekty NASA - Półchłopek Daniel
- Stacja pogodowa - Sywała Maciej
- Bogusiewicz Artur - Android of Things
Wykłady
Wykład 1,
Wykład 2,
Wykład 3,
Wykład 4,
Wykład 5,
Wykład 9,
Wykład 11,
Wykład 12,
Wykład 14
|
{kind=link}